Azure Kinect DK-Koordinatensysteme
In diesem Artikel werden die Konventionen beschrieben, die für 2D- und 3D-Koordinatensysteme verwendet werden. Den Geräten der einzelnen Sensoren und den Kalibrierungsfunktionen, die für die Transformation von Punkten verwendet werden können, sind separate Koordinatensysteme zugeordnet. Mit den Transformationsfunktionen können Bilder vollständig zwischen Koordinatensystemen transformiert werden.
2D-Koordinatensysteme
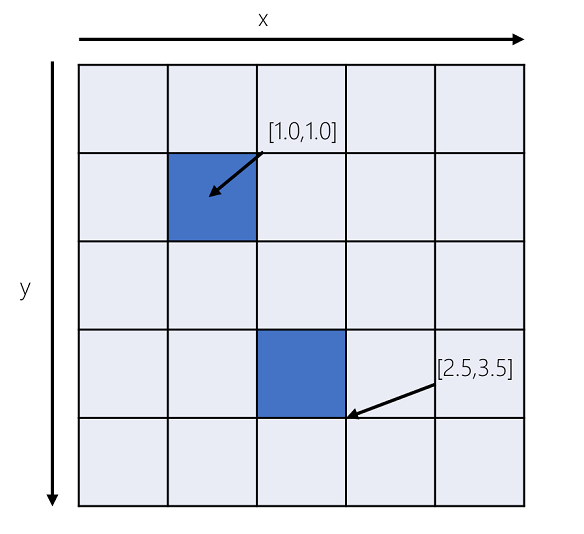
Sowohl Tiefen- als auch Farbkameras sind unabhängige 2D-Koordinatensysteme zugeordnet. [x,y]-Koordinaten werden in Pixeleinheiten angegeben, wobei die x-Werte im Bereich 0 bis width-1 und die y-Werte im Bereich 0 bis height-1 liegen können. Die Breite und die Höhe hängen vom ausgewählten Modus ab, in dem die Tiefen- und Farbkameras betrieben werden. Die Pixelkoordinate [0,0] entspricht dem Pixel links oben im Bild. Bei Pixelkoordinaten kann es sich um fraktionelle Koordinaten handeln, die Subpixelkoordinaten darzustellen.
Das 2D-Koordinatensystem ist 0-zentriert, d. h., die Subpixelkoordinate [0.0, 0.0] stellt den Mittelpunkt und [0.5,0.5] die Ecke rechts unten des Pixels dar (siehe Abbildung unten).
3D-Koordinatensysteme
Jede Kamera, der Beschleunigungsmesser und das Gyroskop sind einem unabhängigen 3D-Koordinatenraumsystem zugeordnet.
Punkte innerhalb des 3D-Koordinatensystems werden als metrische [X,Y,Z]-Koordinatentripel dargestellt, wobei als Einheit Millimeter verwendet wird.
Tiefen- und Farbkamera
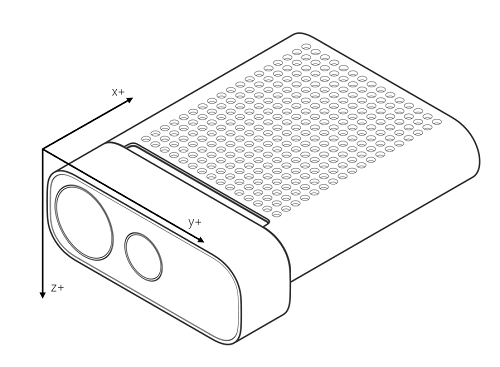
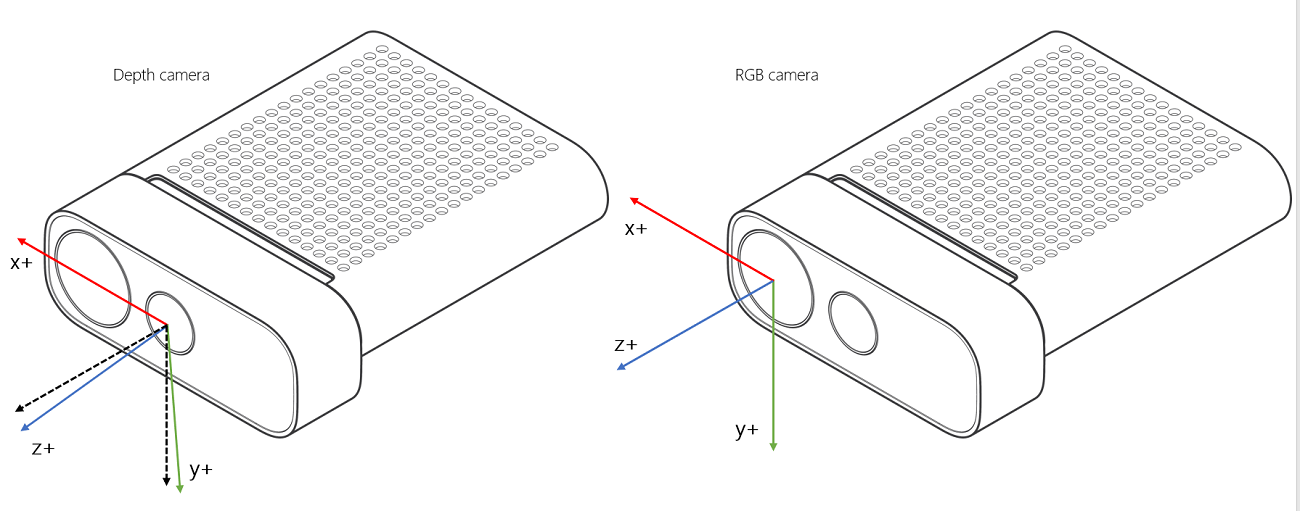
Der Ursprung [0,0,0] befindet sich am Fokuspunkt der Kamera. Das Koordinatensystem ist so ausgerichtet, dass die positive X-Achse nach rechts, die positive Y-Achse nach unten und die positive Z-Achse nach vorne zeigt.
Die Tiefenkamera ist im Verhältnis zur Farbkamera 6 Grad nach unten geneigt, wie nachfolgend gezeigt.
Von der Tiefenkamera werden zwei Beleuchtungseinheiten verwendet. Die in NFOV-Modi (Narrow Field-of-View, schmales Blickfeld) verwendete Beleuchtungseinheit ist am Gehäuse der Tiefenkamera ausgerichtet, sodass sie nicht geneigt ist. Die in WFOV-Modi (Wide Field-of-View, breites Blickfeld) verwendete Beleuchtungseinheit ist im Verhältnis zur Tiefenkamera um weitere 1,3 Grad nach unten geneigt.
Gyroskop und Beschleunigungsmesser
Der Ursprung des Gyroskops [0,0,0] ist mit dem Ursprung der Tiefenkamera identisch. Der Ursprung des Beschleunigungsmessers stimmt mit der physischen Position überein. Die Koordinatensysteme des Beschleunigungsmessers und des Gyroskops sind rechtshändige Koordinatensysteme. Die positive X-Achse des Koordinatensystems zeigt nach hinten, die positive Y-Achse nach links und die positive Z-Achse nach unten (siehe Abbildung unten).