TartanAir: AirSim-Simulationsdataset für gleichzeitige Lokalisierung und Zuordnung (Simultaneous Localization and Mapping, SLAM)
Simultaneous Localization and Mapping (SLAM) zählt zu den wichtigsten Funktionen in der Robotik. Da Bilder überall verbreitet und verfügbar sind, ist Visual SLAM (V-SLAM) zu einer wichtigen Komponente für viele autonome Systeme geworden. Mit geometrie- und lernbasierten Methoden wurden beeindruckende Fortschritte erzielt. Die Entwicklung robuster und zuverlässiger SLAM-Methoden für echte Anwendungsfälle stellt jedoch weiterhin eine Herausforderung dar. In echten Umgebungen gibt es stets problematische Faktoren wie sich ändernde Lichtverhältnisse, unzureichende Beleuchtung, bewegliche Objekte und texturlose Kulissen. Dieses Dataset macht von voranschreitenden Computergrafiktechnologien Gebrauch und soll verschiedenste Szenarios mit herausfordernden Umständen simulieren.
Hinweis
Microsoft stellt Datasets der Plattform Azure Open Datasets auf einer „As is“-Basis (d. h. ohne Mängelgewähr) zur Verfügung. Microsoft übernimmt weder ausdrücklich noch stillschweigend die Gewährleistung für Ihre Nutzung der Datasets und sichert keinerlei Garantien oder Bedingungen zu. Soweit nach örtlich anwendbarem Recht zulässig, lehnt Microsoft jegliche Haftung für Schäden oder Verluste ab. Dies schließt direkte, indirekte, besondere oder zufällige Schäden oder Verluste sowie Folge- und Strafschäden und damit verbundene Verluste ein, die sich aus Ihrer Nutzung der Datasets ergeben.
Für die Bereitstellung dieses Datasets gelten die ursprünglichen Nutzungsbedingungen, unter denen Microsoft die Quelldaten bezogen hat. Das Dataset kann Daten von Microsoft enthalten.
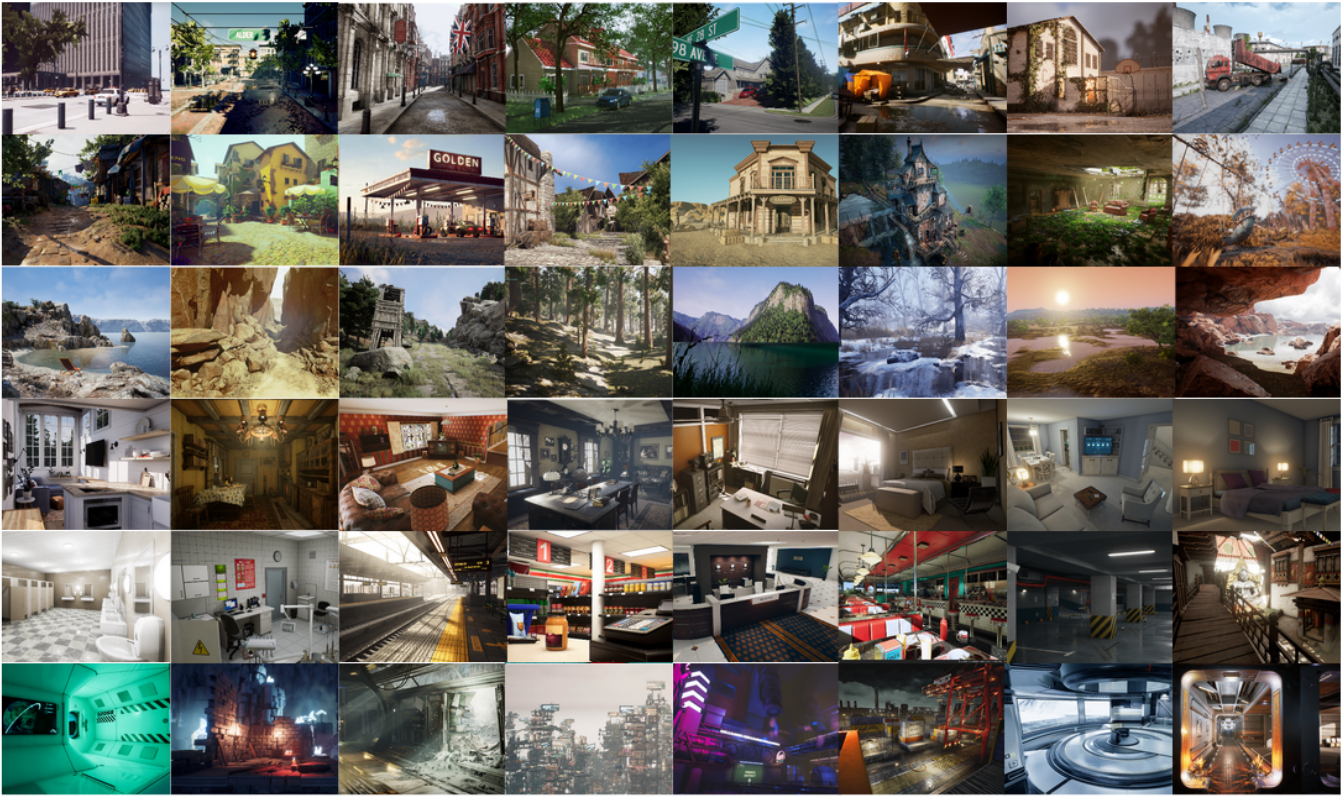
Die Daten werden in fotorealistischen Simulationsumgebungen erfasst, die wechselnde Lichtverhältnisse, unterschiedliche Wetterlagen und bewegliche Objekte umfassen. Durch diese Simulation können wir multimodale Sensordaten und präzise Ground-Truth-Klassifizierungen erfassen, z. B. RGB-Stereobilder, Tiefenbilder, Kamerapositionen, die Segmentierung und den optischen Fluss. Wir richten viele Umgebungen mit unterschiedlichen Gestaltungen und Kulissen ein, sodass herausfordernde Perspektiven und verschiedene Bewegungsmuster erforscht werden können, die mit physischen Methoden zur Datensammlung nur schwer nachzustellen sind. Die vier wichtigsten Features unseres Datasets lauten: 1) diverse realistische Daten im Großformat, 2) multimodale Ground-Truth-Bezeichner, 3) viele verschiedene Bewegungsmuster und 4) anspruchsvolle Szenen.
Mit diesem Dataset werden fünf Typen von Daten bereitgestellt:
- Stereobilder: Bildtyp (PNG)
- Tiefendatei: NumPy-Typ (NPY)
- Segmentierungsdatei: NumPy-Typ (NPY)
- Datei für optischen Fluss: NumPy-Typ (NPY)
- Datei für Kameraposition: Texttyp (TXT)
Diese Daten wurden in verschiedenen Umgebungen erfasst und haben im Jahr 2019 Hunderte von Kurven (3 TB) enthalten.
Herausfordernde visuelle Effekte
In einigen Simulationen simuliert das Dataset verschiedene herausfordernde visuelle Effekte.
- Schwierige Lichtverhältnisse: Wechsel zwischen Tag und Nacht, schwache Ausleuchtung, schnell wechselnde Ausleuchtung
- Wetterbedingungen: klar, regnerisch, verschneit, windig, neblig
- Saisonale Änderungen
Speicherort
Dieses Dataset wird in der Azure-Region „USA, Osten“ gespeichert. Aus Gründen der Affinität wird die Zuweisung von Computeressourcen in der Region „USA, Osten“ empfohlen.
Lizenzbedingungen
Dieses Projekt wird unter der MIT-Lizenz veröffentlicht. Ausführlichere Informationen finden Sie in der Lizenzdatei.
Zusätzliche Informationen
Informieren Sie sich auf der offiziellen TartanAir-Website, oder sehen Sie sich das Originaldokument zur Forschungsarbeit an.
Senden Sie eine E-Mail an tartanair@hotmail.com, wenn Sie Fragen zur Datenquelle haben. Sie können sich über GitHub auch an die Mitwirkenden wenden.
Zitat: Weitere technische Details finden Sie im AirSim-Dokument (FSR 2017-Konferenz). Zitieren Sie dies wie folgt:
@article{tartanair2020arxiv,
title = {TartanAir: A Dataset to Push the Limits of Visual SLAM},
author = {Wenshan Wang, Delong Zhu, Xiangwei Wang, Yaoyu Hu, Yuheng Qiu, Chen Wang, Yafei Hu, Ashish Kapoor, Sebastian Scherer},
journal = {arXiv preprint arXiv:2003.14338},
year = {2020},
url = {https://arxiv.org/abs/2003.14338}
}
@inproceedings{airsim2017fsr,
author = {Shital Shah and Debadeepta Dey and Chris Lovett and Ashish Kapoor},
title = {AirSim: High-Fidelity Visual and Physical Simulation for Autonomous Vehicles},
year = {2017},
booktitle = {Field and Service Robotics},
eprint = {arXiv:1705.05065},
url = {https://arxiv.org/abs/1705.05065}
}
Datenzugriff
Verwenden Sie das folgende Codebeispiel, um auf die Daten in einem Python-Notebook zuzugreifen.
Abhängigkeiten
pip install numpy
pip install azure-storage-blob
pip install opencv-python
Importe und Containerclient
from azure.storage.blob import ContainerClient
import numpy as np
import io
import cv2
import time
import matplotlib.pyplot as plt
%matplotlib inline
# Dataset website: http://theairlab.org/tartanair-dataset/
account_url = 'https://tartanair.blob.core.windows.net/'
container_name = 'tartanair-release1'
container_client = ContainerClient(account_url=account_url,
container_name=container_name,
credential=None)
Umgebungen und Kurven
def get_environment_list():
'''
List all the environments shown in the root directory
'''
env_gen = container_client.walk_blobs()
envlist = []
for env in env_gen:
envlist.append(env.name)
return envlist
def get_trajectory_list(envname, easy_hard = 'Easy'):
'''
List all the trajectory folders, which is named as 'P0XX'
'''
assert(easy_hard=='Easy' or easy_hard=='Hard')
traj_gen = container_client.walk_blobs(name_starts_with=envname + '/' + easy_hard+'/')
trajlist = []
for traj in traj_gen:
trajname = traj.name
trajname_split = trajname.split('/')
trajname_split = [tt for tt in trajname_split if len(tt)>0]
if trajname_split[-1][0] == 'P':
trajlist.append(trajname)
return trajlist
def _list_blobs_in_folder(folder_name):
"""
List all blobs in a virtual folder in an Azure blob container
"""
files = []
generator = container_client.list_blobs(name_starts_with=folder_name)
for blob in generator:
files.append(blob.name)
return files
def get_image_list(trajdir, left_right = 'left'):
assert(left_right == 'left' or left_right == 'right')
files = _list_blobs_in_folder(trajdir + '/image_' + left_right + '/')
files = [fn for fn in files if fn.endswith('.png')]
return files
def get_depth_list(trajdir, left_right = 'left'):
assert(left_right == 'left' or left_right == 'right')
files = _list_blobs_in_folder(trajdir + '/depth_' + left_right + '/')
files = [fn for fn in files if fn.endswith('.npy')]
return files
def get_flow_list(trajdir, ):
files = _list_blobs_in_folder(trajdir + '/flow/')
files = [fn for fn in files if fn.endswith('flow.npy')]
return files
def get_flow_mask_list(trajdir, ):
files = _list_blobs_in_folder(trajdir + '/flow/')
files = [fn for fn in files if fn.endswith('mask.npy')]
return files
def get_posefile(trajdir, left_right = 'left'):
assert(left_right == 'left' or left_right == 'right')
return trajdir + '/pose_' + left_right + '.txt'
def get_seg_list(trajdir, left_right = 'left'):
assert(left_right == 'left' or left_right == 'right')
files = _list_blobs_in_folder(trajdir + '/seg_' + left_right + '/')
files = [fn for fn in files if fn.endswith('.npy')]
return files
Auflisten der Umgebungen
envlist = get_environment_list()
print('Find {} environments..'.format(len(envlist)))
print(envlist)
Auflisten von „einfachen“ Kurven in der ersten Umgebung
diff_level = 'Easy'
env_ind = 0
trajlist = get_trajectory_list(envlist[env_ind], easy_hard = diff_level)
print('Find {} trajectories in {}'.format(len(trajlist), envlist[env_ind]+diff_level))
print(trajlist)
Auflisten aller Datendateien in einer Kurve
traj_ind = 1
traj_dir = trajlist[traj_ind]
left_img_list = get_image_list(traj_dir, left_right = 'left')
print('Find {} left images in {}'.format(len(left_img_list), traj_dir))
right_img_list = get_image_list(traj_dir, left_right = 'right')
print('Find {} right images in {}'.format(len(right_img_list), traj_dir))
left_depth_list = get_depth_list(traj_dir, left_right = 'left')
print('Find {} left depth files in {}'.format(len(left_depth_list), traj_dir))
right_depth_list = get_depth_list(traj_dir, left_right = 'right')
print('Find {} right depth files in {}'.format(len(right_depth_list), traj_dir))
left_seg_list = get_seg_list(traj_dir, left_right = 'left')
print('Find {} left segmentation files in {}'.format(len(left_seg_list), traj_dir))
right_seg_list = get_seg_list(traj_dir, left_right = 'left')
print('Find {} right segmentation files in {}'.format(len(right_seg_list), traj_dir))
flow_list = get_flow_list(traj_dir)
print('Find {} flow files in {}'.format(len(flow_list), traj_dir))
flow_mask_list = get_flow_mask_list(traj_dir)
print('Find {} flow mask files in {}'.format(len(flow_mask_list), traj_dir))
left_pose_file = get_posefile(traj_dir, left_right = 'left')
print('Left pose file: {}'.format(left_pose_file))
right_pose_file = get_posefile(traj_dir, left_right = 'right')
print('Right pose file: {}'.format(right_pose_file))
Funktionen zum Herunterladen von Daten
def read_numpy_file(numpy_file,):
'''
return a numpy array given the file path
'''
bc = container_client.get_blob_client(blob=numpy_file)
data = bc.download_blob()
ee = io.BytesIO(data.content_as_bytes())
ff = np.load(ee)
return ff
def read_image_file(image_file,):
'''
return a uint8 numpy array given the file path
'''
bc = container_client.get_blob_client(blob=image_file)
data = bc.download_blob()
ee = io.BytesIO(data.content_as_bytes())
img=cv2.imdecode(np.asarray(bytearray(ee.read()),dtype=np.uint8), cv2.IMREAD_COLOR)
im_rgb = img[:, :, [2, 1, 0]] # BGR2RGB
return im_rgb
Funktionen zum Visualisieren von Daten
def depth2vis(depth, maxthresh = 50):
depthvis = np.clip(depth,0,maxthresh)
depthvis = depthvis/maxthresh*255
depthvis = depthvis.astype(np.uint8)
depthvis = np.tile(depthvis.reshape(depthvis.shape+(1,)), (1,1,3))
return depthvis
def seg2vis(segnp):
colors = [(205, 92, 92), (0, 255, 0), (199, 21, 133), (32, 178, 170), (233, 150, 122), (0, 0, 255), (128, 0, 0), (255, 0, 0), (255, 0, 255), (176, 196, 222), (139, 0, 139), (102, 205, 170), (128, 0, 128), (0, 255, 255), (0, 255, 255), (127, 255, 212), (222, 184, 135), (128, 128, 0), (255, 99, 71), (0, 128, 0), (218, 165, 32), (100, 149, 237), (30, 144, 255), (255, 0, 255), (112, 128, 144), (72, 61, 139), (165, 42, 42), (0, 128, 128), (255, 255, 0), (255, 182, 193), (107, 142, 35), (0, 0, 128), (135, 206, 235), (128, 0, 0), (0, 0, 255), (160, 82, 45), (0, 128, 128), (128, 128, 0), (25, 25, 112), (255, 215, 0), (154, 205, 50), (205, 133, 63), (255, 140, 0), (220, 20, 60), (255, 20, 147), (95, 158, 160), (138, 43, 226), (127, 255, 0), (123, 104, 238), (255, 160, 122), (92, 205, 92),]
segvis = np.zeros(segnp.shape+(3,), dtype=np.uint8)
for k in range(256):
mask = segnp==k
colorind = k % len(colors)
if np.sum(mask)>0:
segvis[mask,:] = colors[colorind]
return segvis
def _calculate_angle_distance_from_du_dv(du, dv, flagDegree=False):
a = np.arctan2( dv, du )
angleShift = np.pi
if ( True == flagDegree ):
a = a / np.pi * 180
angleShift = 180
# print("Convert angle from radian to degree as demanded by the input file.")
d = np.sqrt( du * du + dv * dv )
return a, d, angleShift
def flow2vis(flownp, maxF=500.0, n=8, mask=None, hueMax=179, angShift=0.0):
"""
Show a optical flow field as the KITTI dataset does.
Some parts of this function is the transform of the original MATLAB code flow_to_color.m.
"""
ang, mag, _ = _calculate_angle_distance_from_du_dv( flownp[:, :, 0], flownp[:, :, 1], flagDegree=False )
# Use Hue, Saturation, Value colour model
hsv = np.zeros( ( ang.shape[0], ang.shape[1], 3 ) , dtype=np.float32)
am = ang < 0
ang[am] = ang[am] + np.pi * 2
hsv[ :, :, 0 ] = np.remainder( ( ang + angShift ) / (2*np.pi), 1 )
hsv[ :, :, 1 ] = mag / maxF * n
hsv[ :, :, 2 ] = (n - hsv[:, :, 1])/n
hsv[:, :, 0] = np.clip( hsv[:, :, 0], 0, 1 ) * hueMax
hsv[:, :, 1:3] = np.clip( hsv[:, :, 1:3], 0, 1 ) * 255
hsv = hsv.astype(np.uint8)
rgb = cv2.cvtColor(hsv, cv2.COLOR_HSV2RGB)
if ( mask is not None ):
mask = mask > 0
rgb[mask] = np.array([0, 0 ,0], dtype=np.uint8)
return rgb
Herunterladen und Visualisieren
data_ind = 173 # randomly select one frame (data_ind < TRAJ_LEN)
left_img = read_image_file(left_img_list[data_ind])
right_img = read_image_file(right_img_list[data_ind])
# Visualize the left and right RGB images
plt.figure(figsize=(12, 5))
plt.subplot(121)
plt.imshow(left_img)
plt.title('Left Image')
plt.subplot(122)
plt.imshow(right_img)
plt.title('Right Image')
plt.show()
# Visualize the left and right depth files
left_depth = read_numpy_file(left_depth_list[data_ind])
left_depth_vis = depth2vis(left_depth)
right_depth = read_numpy_file(right_depth_list[data_ind])
right_depth_vis = depth2vis(right_depth)
plt.figure(figsize=(12, 5))
plt.subplot(121)
plt.imshow(left_depth_vis)
plt.title('Left Depth')
plt.subplot(122)
plt.imshow(right_depth_vis)
plt.title('Right Depth')
plt.show()
# Visualize the left and right segmentation files
left_seg = read_numpy_file(left_seg_list[data_ind])
left_seg_vis = seg2vis(left_seg)
right_seg = read_numpy_file(right_seg_list[data_ind])
right_seg_vis = seg2vis(right_seg)
plt.figure(figsize=(12, 5))
plt.subplot(121)
plt.imshow(left_seg_vis)
plt.title('Left Segmentation')
plt.subplot(122)
plt.imshow(right_seg_vis)
plt.title('Right Segmentation')
plt.show()
# Visualize the flow and mask files
flow = read_numpy_file(flow_list[data_ind])
flow_vis = flow2vis(flow)
flow_mask = read_numpy_file(flow_mask_list[data_ind])
flow_vis_w_mask = flow2vis(flow, mask = flow_mask)
plt.figure(figsize=(12, 5))
plt.subplot(121)
plt.imshow(flow_vis)
plt.title('Optical Flow')
plt.subplot(122)
plt.imshow(flow_vis_w_mask)
plt.title('Optical Flow w/ Mask')
plt.show()
Nächste Schritte
Machen Sie sich mit den restlichen Datasets im Open Datasets-Katalog vertraut.