Entraîner un modèle de détection de petits objets avec AutoML
S’APPLIQUE À : Extension Azure CLI v2 (actuelle)Kit de développement logiciel (SDK) Python azure-ai-ml v2 (version actuelle)
Extension Azure CLI v2 (actuelle)Kit de développement logiciel (SDK) Python azure-ai-ml v2 (version actuelle)
Dans cet article, vous apprenez à entraîner un modèle de détection d’objet pour détecter des petits objets dans des images haute résolution avec le Machine Learning automatisé dans Azure Machine Learning.
En règle générale, les modèles de vision par ordinateur pour la détection d’objet fonctionnent bien pour les jeux de données avec des objets relativement volumineux. Toutefois, en raison des contraintes de mémoire et de calcul, ces modèles ont tendance à être peu performants lorsqu’ils sont chargés de détecter de petits objets dans des images haute résolution. Étant donné que les images haute résolution sont généralement volumineuses, elles sont redimensionnées avant leur entrée dans le modèle, ce qui limite leur capacité à détecter des objets plus petits, par rapport à la taille initiale de l’image.
Pour résoudre ce problème, le Machine Learning automatisé prend en charge la mise en mosaïque dans le cadre des fonctionnalités de vision par ordinateur. La fonctionnalité de mise en mosaïque dans le Machine Learning automatisé est basée sur les concepts présentés dans The Power of Tiling for Small Object Detection (Puissance de la mise en mosaïque pour la détection de petits objets).
Lors de la mise en mosaïque, chaque image est divisée en une grille de vignettes. Les vignettes adjacentes se chevauchent dans la largeur et dans la hauteur. Les vignettes sont rognées à partir de l’original comme indiqué dans l’image suivante.

Prérequis
Un espace de travail Azure Machine Learning. Pour créer l’espace de travail, consultez Créer des ressources d’espace de travail.
Cet article suppose que vous disposez de certaines connaissances sur la façon de configurer une expérience de Machine Learning automatisé pour les tâches de vision par ordinateur.
Modèles pris en charge
La détection d’objets de petite taille à l’aide du tillage est prise en charge pour tous les modèles pris en charge par AML pour les images pour la tâche de détection d’objets.
Activer la mise en mosaïque pendant la formation
Pour activer la mise en mosaïque, vous pouvez définir le paramètre tile_grid_size sur une valeur telle que « 3x2 », où 3 est le nombre de mosaïques le long de la dimension de largeur et 2 le nombre de mosaïques le long de la dimension de hauteur. Quand ce paramètre est défini sur « 3x2 », chaque image est divisée en une grille de 3 x 2 mosaïques. Chaque vignette chevauche les vignettes adjacentes, afin que tous les objets qui se trouvent sur la bordure de la vignette soient entièrement inclus dans l’une des vignettes. Ce chevauchement est contrôlé par le paramètre tile_overlap_ratio, dont la valeur par défaut est 25 %.
Lorsque la mise en mosaïque est activée, l’image entière et les vignettes générées à partir de celle-ci sont transmises par le biais du modèle. Ces images et vignettes sont redimensionnées en fonction des paramètres min_size et max_size avant d’être envoyées au modèle. Le temps de calcul augmente proportionnellement en raison du traitement de ces données supplémentaires.
Par exemple, lorsque le paramètre tile_grid_size a la valeur « 3x2 » le temps de calcul est environ sept fois supérieur au temps de calcul en l’absence de mosaïque.
Vous pouvez spécifier la valeur de tile_grid_size dans vos paramètres d’entraînement sous forme de chaîne.
S’APPLIQUE À :Extension Azure CLI ml v2 (actuel)
training_parameters:
tile_grid_size: '3x2'
La valeur du paramètre tile_grid_size dépend des dimensions de l’image et de la taille des objets dans l’image. Par exemple, un plus grand nombre de vignettes est utile quand il y a des objets plus petits dans les images.
Afin de choisir la valeur optimale pour ce paramètre dans votre jeu de données, vous pouvez utiliser la recherche des hyperparamètres. Pour ce faire, vous pouvez spécifier un choix de valeurs pour ce paramètre dans votre espace des hyperparamètres.
S’APPLIQUE À :Extension Azure CLI ml v2 (actuel)
search_space:
- model_name:
type: choice
values: ['fasterrcnn_resnet50_fpn']
tile_grid_size:
type: choice
values: ['2x1', '3x2', '5x3']
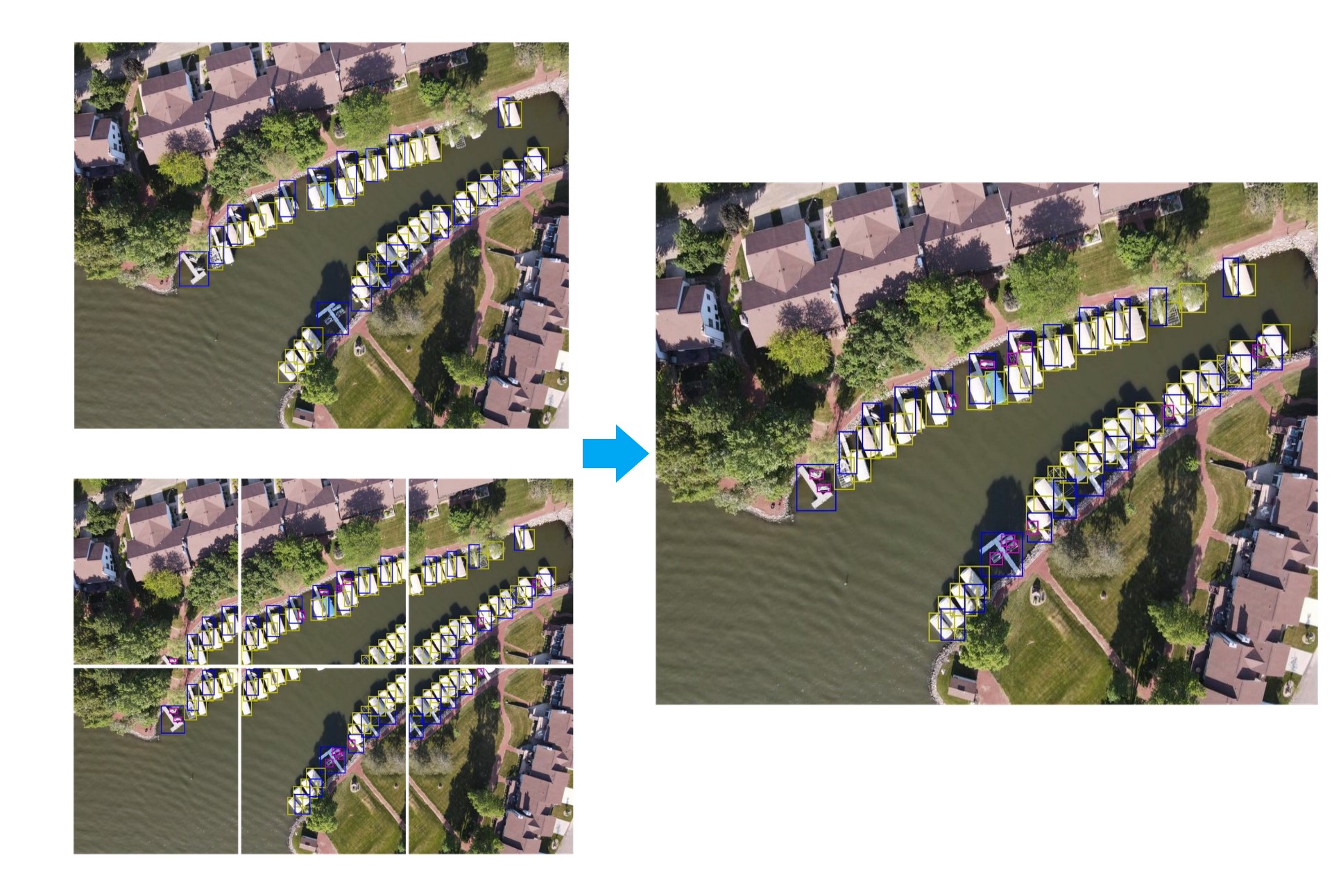
Mise en mosaïque pendant l’inférence
Lorsqu’un modèle entraîné avec la mise en mosaïque est déployé, la mise en mosaïque se produit également pendant l’inférence. Le Machine Learning automatisé utilise la valeur tile_grid_size de la formation pour générer les vignettes pendant l’inférence. L’image entière et les vignettes correspondantes sont transmises par le biais du modèle, et les propositions d’objets qui en découlent sont fusionnées dans les prédictions finales de sortie, comme dans l’image suivante.
Notes
Il est possible que le même objet soit détecté à partir de plusieurs vignettes. La détection de la duplication est effectuée pour supprimer ces doublons.
La détection des doublons est effectuée en exécutant NMS sur les propositions issues des vignettes et de l’image. Lorsque plusieurs propositions se chevauchent, celle avec le score le plus élevé est choisie et les autres sont ignorées en tant que doublons. Deux propositions sont considérées comme se chevauchant lorsque l’intersection sur l’union (iou) entre elles est supérieure au paramètre tile_predictions_nms_thresh.
Vous avez également la possibilité d’activer la mise en mosaïque uniquement pendant l’inférence sans l’activer pendant la formation. Pour ce faire, définissez le paramètre tile_grid_size uniquement pendant l’inférence, et non pour la formation.
Cela peut améliorer les performances de certains jeux de données et n’entraînera pas le coût supplémentaire lié à la mise en mosaïque pendant la formation.
Hyperparamètres de la mise en mosaïque
Voici les paramètres que vous pouvez utiliser pour contrôler la fonctionnalité de mise en mosaïque.
| Nom du paramètre | Description | Default |
|---|---|---|
tile_grid_size |
Taille de la grille à utiliser pour la mise en mosaïque de chaque image. Disponible pour une utilisation au cours de la formation, de la validation et de l’inférence. Doit être passé en tant que chaîne au format '3x2'.Remarque : la définition de ce paramètre augmente le temps de calcul proportionnellement, puisque toutes les vignettes et les images sont traitées par le modèle. |
pas de valeur par défaut |
tile_overlap_ratio |
Contrôle le ratio de chevauchement entre les vignettes adjacentes dans chaque dimension. Lorsque les objets qui se trouvent sur la bordure de la vignette sont trop grands pour tenir entièrement dans l’une des vignettes, augmentez la valeur de ce paramètre pour que les objets tiennent au moins dans l’une des vignettes. Doit être une valeur flottante dans [0, 1). |
0,25 |
tile_predictions_nms_thresh |
Intersection sur le seuil d’union à utiliser pour effectuer une suppression non maximale (nms) lors de la fusion des prédictions à partir des mosaïques et de l’image. Disponible pendant la validation et l’inférence. Modifiez ce paramètre s’il existe plusieurs zones détectées par objet dans les prédictions finales. Doit être une valeur flottante dans [0, 1]. |
0,25 |
Exemples de notebooks
Pour obtenir des exemples de code détaillés de configuration et de formation d’un modèle de détection d’objets, consultez l’exemple de notebook de détection d’objet.
Notes
Toutes les images de cet article sont mises à disposition conformément à la section d’utilisation autorisée du contrat de licence MIT. Copyright © 2020 Roboflow, Inc.
Étapes suivantes
- Découvrez plus d’informations sur comment et où déployer un modèle.
- Pour obtenir des définitions et des exemples des graphiques et métriques de performances fournis pour chaque travail, consultez Évaluer les résultats de l’expérience de Machine Learning automatisé.
- Didacticiel : Effectuer l'apprentissage d’un modèle de détection d’objet avec AutoML et Python.
- Découvrez les hyperparamètres disponibles pour les tâches de vision par ordinateur.
- Effectuez des prédictions avec ONNX sur des modèles de vision par ordinateur à parti d’AutoML