공간 인식 시스템 데이터 공급자 만들기 - MRTK2
공간 인식 시스템은 애플리케이션에 실제 환경에 대한 데이터를 제공하기 위한 확장 가능한 시스템입니다. 새 하드웨어 플랫폼 또는 새로운 형태의 공간 인식 데이터에 대한 지원을 추가하려면 사용자 지정 데이터 공급자가 필요할 수 있습니다.
이 문서에서는 공간 인식 시스템에 대해 공간 관찰자라고도 하는 사용자 지정 데이터 공급자를 만드는 방법을 설명합니다. 여기에 표시된 예제 코드는 3D 메시 데이터를 편집기에서 로드하는 데 유용한 클래스 구현의 SpatialObjectMeshObserver 코드입니다.
참고
이 예제에 사용된 전체 소스 코드는 폴더에서 Assets/MRTK/Providers/ObjectMeshObserver 찾을 수 있습니다.
네임스페이스 및 폴더 구조
데이터 공급자는 다음 두 가지 방법 중 하나로 배포할 수 있습니다.
- 타사 추가 기능
- Microsoft Mixed Reality 도구 키트의 일부
새 데이터 공급자를 MRTK에 제출하기 위한 승인 프로세스는 사례별로 다르며 초기 제안 시 전달됩니다. 새 기능 요청 유형 문제를 만들어 제안서를 제출할 수 있습니다.
타사 추가 기능
Namespace
데이터 공급자는 잠재적인 이름 충돌을 완화하기 위해 네임스페이스가 있어야 합니다. 네임스페이스에는 다음 구성 요소가 포함되어 있는 것이 좋습니다.
- 추가 기능을 생성하는 회사 이름
- 기능 영역
예를 들어 Contoso 회사에서 만들고 제공하는 공간 인식 데이터 공급자는 "Contoso.MixedReality.Toolkit.SpatialAwareness"일 수 있습니다.
폴더 구조
다음 이미지와 같이 데이터 공급자의 소스 코드를 폴더 계층 구조에 배치하는 것이 좋습니다.

ContosoSpatialAwareness 폴더에 데이터 공급자의 구현이 포함된 경우 Editor 폴더에는 검사기(및 기타 Unity 편집기 관련 코드)가 포함되며 Profiles 폴더에는 미리 만들어진 프로필 스크립트 가능 개체가 하나 이상 포함되어 있습니다.
MRTK 제출
Namespace
공간 인식 시스템 데이터 공급자가 Mixed Reality Toolkit 리포지토리에 제출되는 경우 네임스페이스는 Microsoft.MixedReality.Toolkit(예: Microsoft.MixedReality.Toolkit.SpatialObjectMeshObserver)로 시작해야 합니다.
및 코드는 MRTK/Providers(예: MRTK/Providers/ObjectMeshObserver) 아래의 폴더에 있어야 합니다.
폴더 구조
모든 코드는 MRTK/Providers(예: MRTK/Providers/ObjectMeshObserver) 아래의 폴더에 있어야 합니다.
공간 데이터 개체 정의
공간 인식 데이터 공급자를 만드는 첫 번째 단계는 애플리케이션에 제공할 데이터 형식(예: 메시 또는 평면)을 결정하는 것입니다.
모든 공간 데이터 개체는 인터페이스를 IMixedRealitySpatialAwarenessObject 구현해야 합니다.
Mixed Reality Toolkit 파운데이션은 새 데이터 공급자에서 사용하거나 확장할 수 있는 다음과 같은 공간 개체를 제공합니다.
데이터 공급자 구현
인터페이스 및/또는 기본 클래스 상속 지정
모든 공간 인식 데이터 공급자는 공간 인식 시스템에 필요한 최소 기능을 지정하는 인터페이스를 구현 IMixedRealitySpatialAwarenessObserver 해야 합니다. MRTK 파운데이션에는 이 필수 기능의 기본 구현을 제공하는 클래스가 포함되어 BaseSpatialObserver 있습니다.
public class SpatialObjectMeshObserver :
BaseSpatialObserver,
IMixedRealitySpatialAwarenessMeshObserver,
IMixedRealityCapabilityCheck
{ }
참고
인터페이스는 IMixedRealityCapabilityCheck SpatialAwarenessMesh 기능에 대한 지원을 제공한다는 것을 나타내기 위해 클래스에서 사용됩니다 SpatialObjectMeshObserver .
MixedRealityDataProvider 특성 적용
Spatial Awareness 데이터 공급자를 만드는 주요 단계는 특성을 클래스에 MixedRealityDataProvider 적용하는 것입니다. 이 단계에서는 공간 인식 프로필과 이름, 폴더 경로 등에서 선택할 때 데이터 공급자에 대한 기본 프로필 및 플랫폼을 설정할 수 있습니다.
[MixedRealityDataProvider(
typeof(IMixedRealitySpatialAwarenessSystem),
SupportedPlatforms.WindowsEditor | SupportedPlatforms.MacEditor | SupportedPlatforms.LinuxEditor,
"Spatial Object Mesh Observer",
"ObjectMeshObserver/Profiles/DefaultObjectMeshObserverProfile.asset",
"MixedRealityToolkit.Providers")]
public class SpatialObjectMeshObserver :
BaseSpatialObserver,
IMixedRealitySpatialAwarenessMeshObserver,
IMixedRealityCapabilityCheck
{ }
IMixedRealityDataProvider 메서드 구현
클래스가 정의되면 다음 단계는 인터페이스의 IMixedRealityDataProvider 구현을 제공하는 것입니다.
참고
클래스를 BaseSpatialObserver 통해 클래스는 BaseService 메서드에 대한 IMixedRealityDataProvider 빈 구현만 제공합니다. 이러한 메서드의 세부 정보는 일반적으로 데이터 공급자에 따라 다릅니다.
데이터 공급자가 구현해야 하는 메서드는 다음과 같습니다.
Destroy()Disable()Enable()Initialize()Reset()Update()
데이터 공급자 논리 구현
다음 단계는 특정 데이터 공급자 인터페이스(예 IMixedRealitySpatialAwarenessMeshObserver: )를 구현하여 데이터 공급자의 논리를 추가하는 것입니다. 데이터 공급자의 이 부분은 일반적으로 플랫폼에 따라 다릅니다.
관찰 변경 알림
애플리케이션이 디바이스의 환경 이해 변경에 응답할 수 있도록 데이터 공급자는 인터페이스에 IMixedRealitySpatialAwarenessObservationtHandler<T> 정의된 대로 알림 이벤트를 발생합니다.
OnObservationAdded()OnObservationRemoved()OnObservationUpdated()
예제의 SpatialObjectMeshObserver 다음 코드는 메시 데이터가 추가되면 발생 및 이벤트를 보여 줍니다.
// The data to be sent when mesh observation events occur.
// This member variable is initialized as part of the Initialize() method.
private MixedRealitySpatialAwarenessEventData<SpatialAwarenessMeshObject> meshEventData = null;
/// <summary>
/// Sends the observations using the mesh data contained within the configured 3D model.
/// </summary>
private void SendMeshObjects()
{
if (!sendObservations) { return; }
if (spatialMeshObject != null)
{
MeshFilter[] meshFilters = spatialMeshObject.GetComponentsInChildren<MeshFilter>();
for (int i = 0; i < meshFilters.Length; i++)
{
SpatialAwarenessMeshObject meshObject = SpatialAwarenessMeshObject.Create(
meshFilters[i].sharedMesh,
MeshPhysicsLayer,
$"Spatial Object Mesh {currentMeshId}",
currentMeshId,
ObservedObjectParent);
meshObject.GameObject.transform.localPosition = meshFilters[i].transform.position;
meshObject.GameObject.transform.localRotation = meshFilters[i].transform.rotation;
ApplyMeshMaterial(meshObject);
meshes.Add(currentMeshId, meshObject);
// Initialize the meshEventData variable with data for the added event.
meshEventData.Initialize(this, currentMeshId, meshObject);
// Raise the event via the spatial awareness system.
SpatialAwarenessSystem?.HandleEvent(meshEventData, OnMeshAdded);
currentMeshId++;
}
}
sendObservations = false;
}
참고
SpatialObjectMeshObserver 3D 모델이 한 번만 로드되므로 클래스는 이벤트를 발생 OnObservationUpdated 시키지 않습니다. 클래스의 WindowsMixedRealitySpatialMeshObserver 구현은 관찰된 메시에 대한 이벤트를 발생시키는 OnObservationUpdated 예제를 제공합니다.
Unity Profiler 계측 추가
성능은 혼합 현실 애플리케이션에서 매우 중요합니다. 모든 구성 요소는 애플리케이션이 고려해야 하는 약간의 오버헤드를 추가합니다. 이를 위해 모든 공간 인식 데이터 공급자에는 내부 루프의 Unity Profiler 계측과 자주 사용하는 코드 경로가 포함되어야 합니다.
사용자 지정 공급자를 계측할 때 MRTK에서 활용하는 패턴을 구현하는 것이 좋습니다.
private static readonly ProfilerMarker UpdateObserverPerfMarker = new ProfilerMarker("[MRTK] WindowsMixedRealitySpatialMeshObserver.UpdateObserver");
/// <summary>
/// Requests updates from the surface observer.
/// </summary>
private void UpdateObserver()
{
using (UpdateObserverPerfMarker.Auto())
{
// Code to be measured.
}
}
참고
프로파일러 마커를 식별하는 데 사용되는 이름은 임의입니다. MRTK는 다음 패턴을 사용합니다.
"[product] className.methodName - 선택적 참고"
사용자 지정 데이터 공급자는 추적을 분석할 때 특정 구성 요소 및 메서드의 식별을 간소화하기 위해 유사한 패턴을 따르는 것이 좋습니다.
프로필 및 검사기 만들기
Mixed Reality 도구 키트에서 데이터 공급자는 프로필을 사용하여 구성됩니다.
프로필 정의
프로필 콘텐츠는 데이터 공급자의 액세스 가능한 속성(예: 업데이트 간격)을 미러 합니다. 각 인터페이스에 정의된 모든 사용자 구성 가능 속성은 프로필에 포함되어야 합니다.
새 데이터 공급자가 기존 공급자를 확장하는 경우 기본 클래스를 사용하는 것이 좋습니다. 예를 들어 는 SpatialObjectMeshObserverProfile 고객이 환경 데이터로 사용할 3D 모델을 제공할 수 있도록 를 확장합니다 MixedRealitySpatialAwarenessMeshObserverProfile .
[CreateAssetMenu(
menuName = "Mixed Reality Toolkit/Profiles/Spatial Object Mesh Observer Profile",
fileName = "SpatialObjectMeshObserverProfile",
order = 100)]
public class SpatialObjectMeshObserverProfile : MixedRealitySpatialAwarenessMeshObserverProfile
{
[SerializeField]
[Tooltip("The model containing the desired mesh data.")]
private GameObject spatialMeshObject = null;
/// <summary>
/// The model containing the desired mesh data.
/// </summary>
public GameObject SpatialMeshObject => spatialMeshObject;
}
CreateAssetMenu 고객이자산>만들기>Mixed Reality 도구 키트프로필 메뉴를 사용하여 프로필 instance 만들 수 있도록 프로필 클래스에 > 특성을 적용할 수있습니다.
검사기 구현
프로필 검사자는 프로필 콘텐츠를 구성하고 보기 위한 사용자 인터페이스입니다. 각 프로필 검사기에서 클래스를 BaseMixedRealityToolkitConfigurationProfileInspector 확장해야 합니다.
특성은 CustomEditor 검사자가 적용되는 자산 유형을 Unity에 알릴 수 있습니다.
[CustomEditor(typeof(SpatialObjectMeshObserverProfile))]
public class SpatialObjectMeshObserverProfileInspector : BaseMixedRealityToolkitConfigurationProfileInspector
{ }
어셈블리 정의 만들기
Mixed Reality Toolkit은 어셈블리 정의(.asmdef) 파일을 사용하여 구성 요소 간의 종속성을 지정하고 Unity가 컴파일 시간을 줄이는 데 도움을 줍니다.
모든 데이터 공급자 및 해당 편집기 구성 요소에 대해 어셈블리 정의 파일을 만드는 것이 좋습니다.
이전 예제의 폴더 구조를 사용하면 ContosoSpatialAwareness 데이터 공급자에 대한 두 개의 .asmdef 파일이 있습니다.
첫 번째 어셈블리 정의는 데이터 공급자에 대한 것입니다. 이 예제에서는 ContosoSpatialAwareness라고 하며 이 예제의 ContosoSpatialAwareness 폴더에 있습니다. 이 어셈블리 정의는 Microsoft.MixedReality.Toolkit 및 종속되는 다른 어셈블리에 대한 종속성을 지정해야 합니다.
ContosoInputEditor 어셈블리 정의는 프로필 검사기와 편집기별 코드를 지정합니다. 이 파일은 편집기 코드의 루트 폴더에 있어야 합니다. 이 예제에서 파일은 ContosoSpatialAwareness\Editor 폴더에 있습니다. 이 어셈블리 정의에는 ContosoSpatialAwareness 어셈블리에 대한 참조도 포함됩니다.
- Microsoft.MixedReality.Toolkit
- Microsoft.MixedReality.Toolkit.Editor.Inspectors
- Microsoft.MixedReality.Toolkit.Editor.Utilities
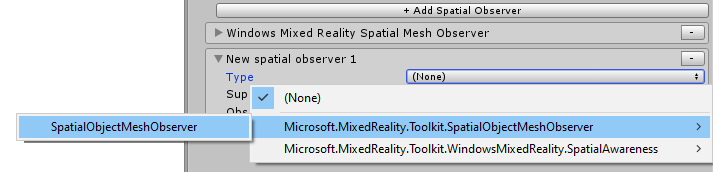
데이터 공급자 등록
만든 후에는 애플리케이션에서 사용할 공간 인식 시스템에 데이터 공급자를 등록할 수 있습니다.
패키징 및 배포
타사 구성 요소로 배포되는 데이터 공급자에는 패키징 및 배포에 대한 구체적인 세부 정보가 개발자의 기본 설정으로 남아 있습니다. 가장 일반적인 솔루션은 .unitypackage를 생성하고 Unity 자산 저장소를 통해 배포하는 것입니다.
데이터 공급자가 Microsoft Mixed Reality 도구 키트 패키지의 일부로 제출되고 수락되는 경우 Microsoft MRTK 팀은 이를 MRTK 제품의 일부로 패키지하고 배포합니다.
추가 정보
- 공간 인식 시스템
IMixedRealitySpatialAwarenessObject인터페이스BaseSpatialAwarenessObject클래스SpatialAwarenessMeshObject클래스SpatialAwarenessPlanarObject클래스IMixedRealitySpatialAwarenessObserver인터페이스BaseSpatialObserver클래스IMixedRealitySpatialAwarenessMeshObserver인터페이스IMixedRealityDataProvider인터페이스IMixedRealityCapabilityCheck인터페이스