Configurando observadores de malha para dispositivo — MRTK2
Este guia abordará a configuração do Observador de Malha Espacial pronto para uso no MRTK, que dá suporte à plataforma Windows Mixed Reality (por exemplo, HoloLens). A implementação padrão fornecida por Realidade Misturada Toolkit é a classe WindowsMixedRealitySpatialMeshObserver. Muitas das propriedades neste artigo, porém, se aplicam a outras implementações personalizadas do Observer.
Configurações de perfil
Os dois itens a seguir devem ser definidos primeiro ao configurar um perfil do Observador de Malha Espacial para o sistema de Reconhecimento Espacial.
- A implementação concreta do tipo observador
- lista de plataformas com suporte para executar este observador
Observação
Todos os observadores devem estender a interface IMixedRealitySpatialAwarenessObserver .

Configurações gerais
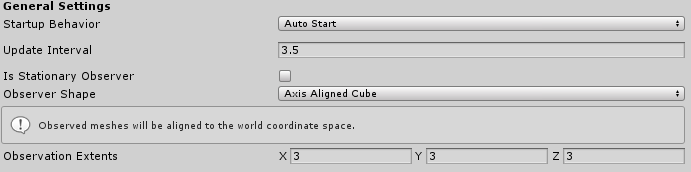
Comportamento de inicialização
O comportamento de inicialização especifica se o observador começará a ser executado quando for instanciado pela primeira vez. As duas opções são:
- Início Automático – o valor padrão pelo qual o observador iniciará a operação após a inicialização
- Início Manual – O Observador aguardará para ser direcionado para iniciar
Se estiver usando o Início Manual, será necessário retomá-los e suspendê-los no runtime por meio do código.
Intervalo de Atualização
O tempo, em segundos, entre solicitações à plataforma para atualizar dados de malha espacial. Os valores típicos caem no intervalo de 0,1 e 5,0 segundos.
É Observador Estacionário
Indica se o observador deve ou não permanecer parado ou mover e atualizar com o usuário. Se for true, a Forma do Observador com volume definido por Extensões de Observação permanecerá na origem na inicialização. Se for falso, o espaço do Observador seguirá a cabeça do usuário como a origem da forma.
Não haverá dados de malha calculados para qualquer área física fora do espaço do Observador, conforme definido por estas propriedades: é Observador Estacionário, Forma do Observador*e Extensões de Observação.
Forma do Observador
A forma do observador define o tipo de volume que o observador de malha usará ao observar malhas. As opções com suporte são:
- Cubo Alinhado ao Eixo – forma retangular que permanece alinhada com os eixos do sistema de coordenadas do mundo, conforme determinado na inicialização do aplicativo.
- Cubo Alinhado pelo Usuário – forma retangular que gira para se alinhar com o sistema de coordenadas local dos usuários.
- Sphere – um volume esférico com um centro na origem espacial mundial. O valor X da propriedade Extensões de Observação será usado como o raio da esfera.
Extensões de observação
As extensões de observação definem a distância do ponto de observação que as malhas serão observadas.
Configurações de física

Camada física
A camada física na qual os objetos de malha espacial serão colocados para interagir com os sistemas Física e RayCast do Unity.
Observação
Realidade Misturada Toolkit reserva a camada 31 por padrão para uso por observadores de Reconhecimento Espacial.
Recalcular normais
Especifica se o observador de malha recalculará ou não os normais da malha após a observação. Essa configuração está disponível para garantir que os aplicativos recebam malhas que contenham dados normais válidos em plataformas que não os retornam com malhas.
Nível de configurações de detalhes

Nível de detalhes
Especifica o nível de detalhes (LOD) dos dados de malha espacial. Os valores definidos atualmente são Grosseiro, Fino e Personalizado.
Grosseiro – coloca um impacto menor no desempenho do aplicativo e é uma excelente opção para a localização de navegação/plano.
Configuração média - balanceada geralmente útil para experiências que examinam continuamente o ambiente em busca de recursos grandes, pisos e paredes, bem como detalhes de oclusão.
Fine – geralmente exige um impacto maior no desempenho do aplicativo e é uma ótima opção para malhas de oclusão.
Personalizado – requer que o aplicativo especifique a propriedade Triangles /Cubic Meter e permite que os aplicativos ajustem a precisão versus o impacto no desempenho do observador de malha espacial.
Observação
Não é garantido que todos os valores de Triângulos/Medidor Cúbico sejam respeitados por todas as plataformas. A experimentação e a criação de perfil são altamente recomendadas ao usar um LOD personalizado.
Triângulos por medidor cúbico
Válido ao usar a configuração Custom para a propriedade Level of Detail e especifica a densidade de triângulo para a malha espacial.
Configurações de vídeo

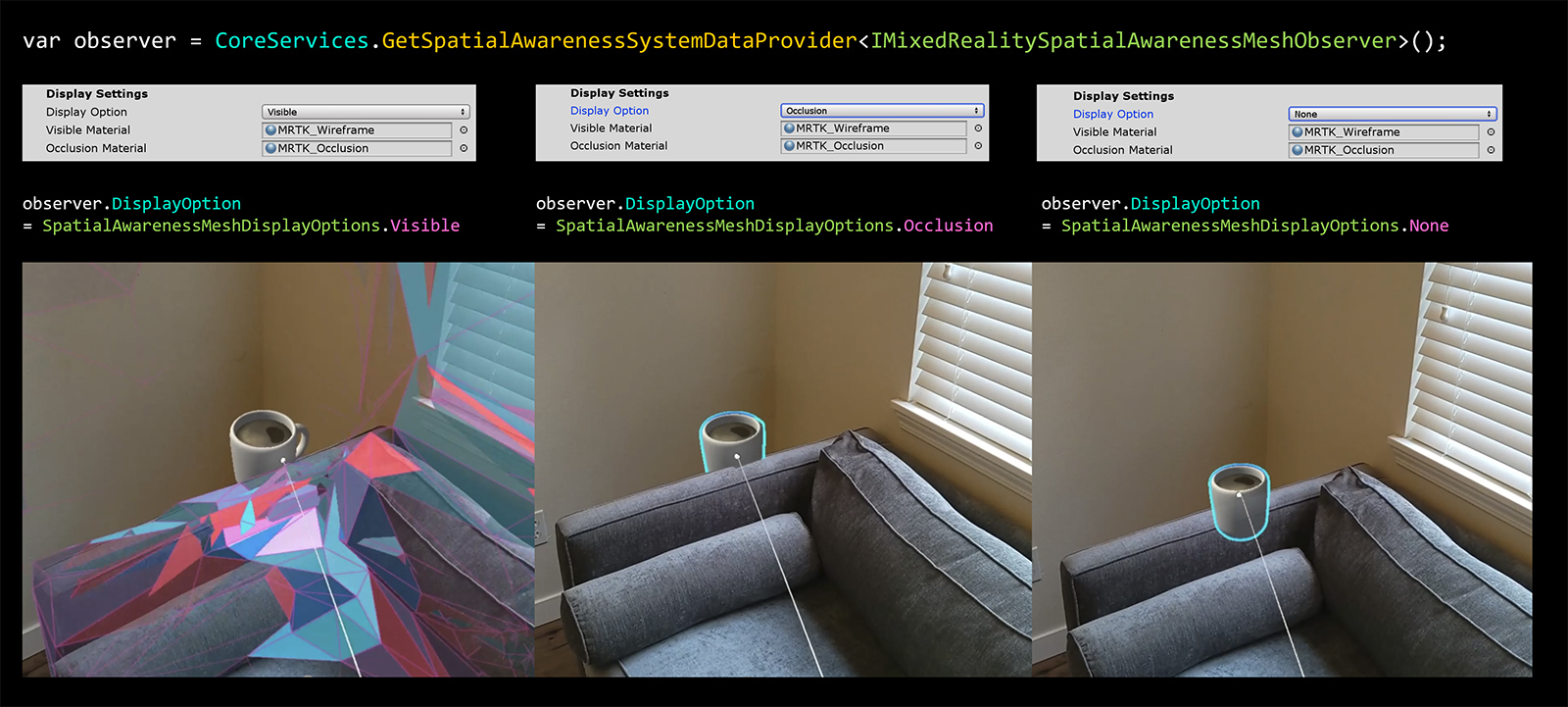
Opção de exibição
Especifica como as malhas espaciais devem ser exibidas pelo observador. Os valores com suporte são:
- Nenhum – o Observador não renderizará a malha
- Visível – Os dados da malha ficarão visíveis usando o Material Visível
- Oclusão – Os dados de malha serão itens oclusão na cena usando o Material de Oclusão
Observadores Espaciais podem ser retomados/suspensos em runtime por meio de código.
Aviso
Definir a opção De exibição como Nenhumnão impede a execução do observador. Se você quiser parar todos os observadores, os aplicativos precisarão suspender todos os observadores por meio de CoreServices.SpatialAwareness.SuspendObservers()
Material Visível
Indica o material a ser usado ao visualizar a malha espacial.
Material de oclusão
Indica o material a ser usado para fazer com que a malha espacial oclua hologramas.