TartanAir: Eşzamanlı yerelleştirme ve eşleme için AirSim simülasyon veri kümesi (SLAM)
Anında Yerelleştirme ve Eşleme (SLAM), robotlar için gereken en temel özelliklerden biridir. Görüntülerin yaygın olarak kullanılması nedeniyle, Görsel SLAM (V-SLAM) birçok otonom sistemin önemli bir bileşeni haline geldi. Hem geometrik tabanlı yöntemler hem de öğrenme tabanlı yöntemler ile önemli ilerlemeler kaydedildi. Ancak, gerçek uygulamalar için güçlü ve güvenilir SLAM yöntemleri geliştirmek hala zorluklara yol açan bir sorundur. Gerçek ortamlarda ışık değişiklikleri veya ışık olmaması, dinamik nesneler ve dokusuz manzaralar gibi zor durumlarla karşılaşırsınız. Gelişmiş bilgisayar grafikleri teknolojisinden yararlanan bu veri kümesi, zorlu özellikler içeren çeşitli senaryoları simülasyon sayesinde kapsamına almayı hedefler.
Not
Microsoft, Azure Açık Veri Kümelerini "olduğu gibi" temel alarak sağlar. Microsoft, veri kümelerini kullanımınızla ilgili olarak açık veya zımni hiçbir garanti veya koşul sağlamaz. Yerel yasalarınız kapsamında izin verilen ölçüde, Microsoft veri kümelerini kullanmanızdan kaynaklanan doğrudan, neticede, özel, dolaylı, arızi veya cezai dahil olmak üzere her türlü zarar veya kayıpla ilgili tüm sorumluluğu kabul etmez.
Bu veri kümesi Microsoft’un kaynak verileri aldığı orijinal hükümler kapsamında sağlanır. Veri kümesi Microsoft’tan alınan verileri içerebilir.
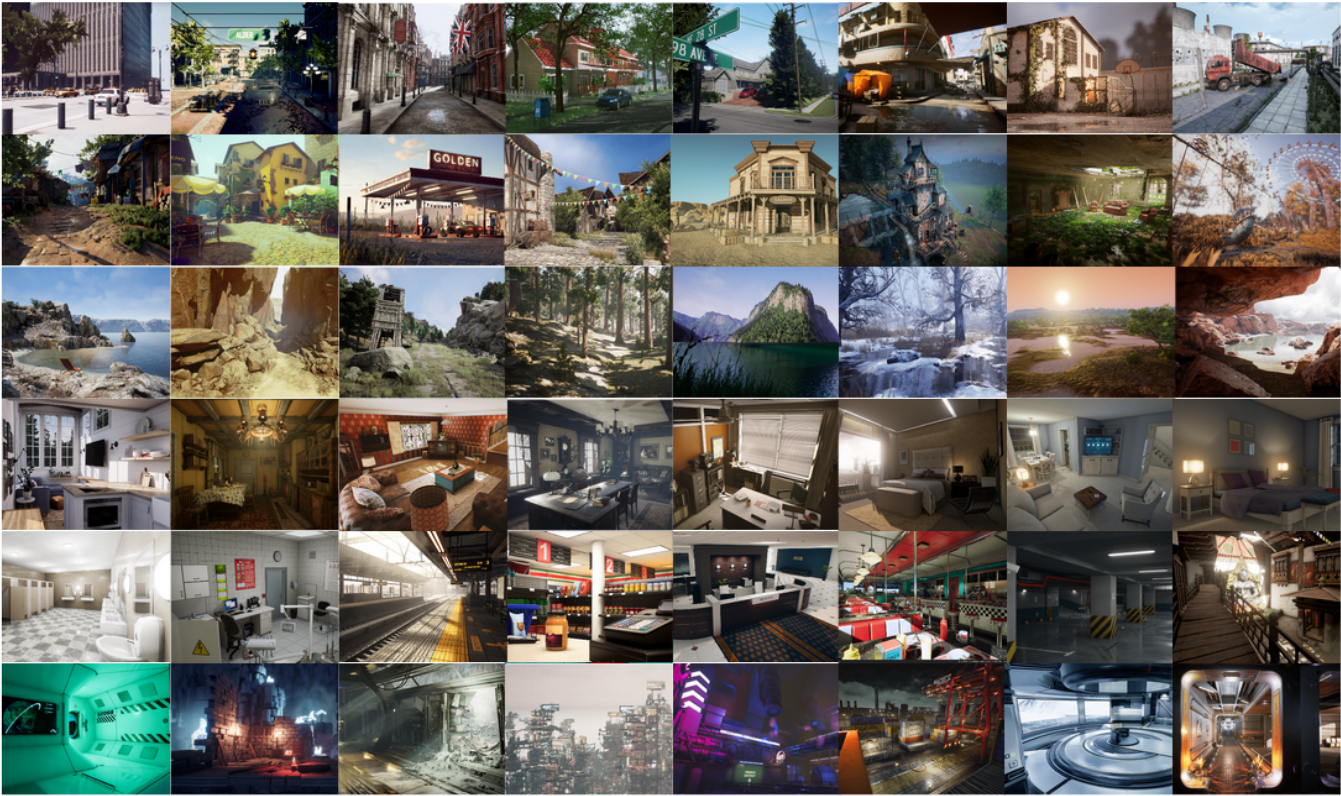
Veriler çeşitli ışık koşulları, hava durumu ve hareketli nesnelerin varlığında fotoğraf gerçekçi simülasyon ortamlarında toplanır. Simülasyonda veri toplayarak, stereo RGB görüntü, derinlik görüntüsü, segmentasyon, optik akış ve kamera pozları dahil çoklu kalıcı algılayıcı verileri ve net doğruluk etiketleri elde ettik. Çeşitli stiller ve sahneler ile fiziksel veri toplama platformları kullanılarak elde edilmesi zor olan görünüm noktalarını ve çeşitli hareket desenlerini kapsayan çok sayıda ortam ayarladık. Veri kümemizin en önemli dört özelliği şunlardır: 1) Büyük boyutlu farklı gerçekçi veriler; 2) Çokmodal zemin gerçeği etiketleri; 3) Hareket desenlerinin çeşitliliği; 4) Zorlu Sahneler.
Bu veri kümesi beş tür veri sağlar:
- Stereo görüntüler: görüntü türü (PNG)
- Derinlik dosyası: numpy türü (NPY)
- Segmentasyon dosyası: numpy türü (NPY)
- Optik akış dosyası: numpy türü (NPY)
- Kamera poz dosyası: metin türü (TXT)
Farklı ortamlardan toplanır, 2019 itibarıyla toplamda yüzlerce yörünge (3 TB) içerir.
Zorlayıcı görsel efektler
Bazı simülasyonlarda veri kümesi, birden fazla türde zorlayıcı görsel efektin simülasyonunu yapar.
- Zorlu aydınlatma koşulları. Günüz-gece geçişi. Düşük ışık. Işığın hızla değişmesi.
- Hava durumunun etkileri. Açık, yağmurlu, kar yağışlı, rüzgarlı ve sisli.
- Mevsim değişikliği.
Depolama konumu
Bu veri kümesi Doğu ABD Azure bölgesinde depolanır. Benzeşim için Doğu ABD’deki işlem kaynaklarının ayrılması önerilir.
Lisans koşulları
Bu proje MIT Lisansı altında yayınlanmıştır. Diğer ayrıntılar için Lisans dosyasını gözden geçirin.
Ek bilgiler
Resmi TartanAir web sitesini veya orijinal araştırma makalesini görüntüleyin.
Veri kaynağı hakkında sorularınız olursa tartanair@hotmail.com adresine e-posta gönderin. Katkıda bulunanlara ilişkili GitHub üzerinden de ulaşabilirsiniz.
Alıntı AirSim (FSR 2017 Konferansı) makalesinde daha fazla teknik ayrıntı bulabilirsiniz. Şu şekilde alıntı yapın:
@article{tartanair2020arxiv,
title = {TartanAir: A Dataset to Push the Limits of Visual SLAM},
author = {Wenshan Wang, Delong Zhu, Xiangwei Wang, Yaoyu Hu, Yuheng Qiu, Chen Wang, Yafei Hu, Ashish Kapoor, Sebastian Scherer},
journal = {arXiv preprint arXiv:2003.14338},
year = {2020},
url = {https://arxiv.org/abs/2003.14338}
}
@inproceedings{airsim2017fsr,
author = {Shital Shah and Debadeepta Dey and Chris Lovett and Ashish Kapoor},
title = {AirSim: High-Fidelity Visual and Physical Simulation for Autonomous Vehicles},
year = {2017},
booktitle = {Field and Service Robotics},
eprint = {arXiv:1705.05065},
url = {https://arxiv.org/abs/1705.05065}
}
Veri erişimi
Python not defterindeki verilere erişmek için aşağıdaki kod örneğini kullanın.
Bağımlılıklar
pip install numpy
pip install azure-storage-blob
pip install opencv-python
İçeri aktarmalar ve kapsayıcı istemcisi
from azure.storage.blob import ContainerClient
import numpy as np
import io
import cv2
import time
import matplotlib.pyplot as plt
%matplotlib inline
# Dataset website: http://theairlab.org/tartanair-dataset/
account_url = 'https://tartanair.blob.core.windows.net/'
container_name = 'tartanair-release1'
container_client = ContainerClient(account_url=account_url,
container_name=container_name,
credential=None)
Ortamlar ve yörüngeler
def get_environment_list():
'''
List all the environments shown in the root directory
'''
env_gen = container_client.walk_blobs()
envlist = []
for env in env_gen:
envlist.append(env.name)
return envlist
def get_trajectory_list(envname, easy_hard = 'Easy'):
'''
List all the trajectory folders, which is named as 'P0XX'
'''
assert(easy_hard=='Easy' or easy_hard=='Hard')
traj_gen = container_client.walk_blobs(name_starts_with=envname + '/' + easy_hard+'/')
trajlist = []
for traj in traj_gen:
trajname = traj.name
trajname_split = trajname.split('/')
trajname_split = [tt for tt in trajname_split if len(tt)>0]
if trajname_split[-1][0] == 'P':
trajlist.append(trajname)
return trajlist
def _list_blobs_in_folder(folder_name):
"""
List all blobs in a virtual folder in an Azure blob container
"""
files = []
generator = container_client.list_blobs(name_starts_with=folder_name)
for blob in generator:
files.append(blob.name)
return files
def get_image_list(trajdir, left_right = 'left'):
assert(left_right == 'left' or left_right == 'right')
files = _list_blobs_in_folder(trajdir + '/image_' + left_right + '/')
files = [fn for fn in files if fn.endswith('.png')]
return files
def get_depth_list(trajdir, left_right = 'left'):
assert(left_right == 'left' or left_right == 'right')
files = _list_blobs_in_folder(trajdir + '/depth_' + left_right + '/')
files = [fn for fn in files if fn.endswith('.npy')]
return files
def get_flow_list(trajdir, ):
files = _list_blobs_in_folder(trajdir + '/flow/')
files = [fn for fn in files if fn.endswith('flow.npy')]
return files
def get_flow_mask_list(trajdir, ):
files = _list_blobs_in_folder(trajdir + '/flow/')
files = [fn for fn in files if fn.endswith('mask.npy')]
return files
def get_posefile(trajdir, left_right = 'left'):
assert(left_right == 'left' or left_right == 'right')
return trajdir + '/pose_' + left_right + '.txt'
def get_seg_list(trajdir, left_right = 'left'):
assert(left_right == 'left' or left_right == 'right')
files = _list_blobs_in_folder(trajdir + '/seg_' + left_right + '/')
files = [fn for fn in files if fn.endswith('.npy')]
return files
Ortamları listeleme
envlist = get_environment_list()
print('Find {} environments..'.format(len(envlist)))
print(envlist)
İlk ortamdaki 'Kolay' yörüngeleri listeleme
diff_level = 'Easy'
env_ind = 0
trajlist = get_trajectory_list(envlist[env_ind], easy_hard = diff_level)
print('Find {} trajectories in {}'.format(len(trajlist), envlist[env_ind]+diff_level))
print(trajlist)
Tüm veri dosyalarını tek bir yörüngede listeleme
traj_ind = 1
traj_dir = trajlist[traj_ind]
left_img_list = get_image_list(traj_dir, left_right = 'left')
print('Find {} left images in {}'.format(len(left_img_list), traj_dir))
right_img_list = get_image_list(traj_dir, left_right = 'right')
print('Find {} right images in {}'.format(len(right_img_list), traj_dir))
left_depth_list = get_depth_list(traj_dir, left_right = 'left')
print('Find {} left depth files in {}'.format(len(left_depth_list), traj_dir))
right_depth_list = get_depth_list(traj_dir, left_right = 'right')
print('Find {} right depth files in {}'.format(len(right_depth_list), traj_dir))
left_seg_list = get_seg_list(traj_dir, left_right = 'left')
print('Find {} left segmentation files in {}'.format(len(left_seg_list), traj_dir))
right_seg_list = get_seg_list(traj_dir, left_right = 'left')
print('Find {} right segmentation files in {}'.format(len(right_seg_list), traj_dir))
flow_list = get_flow_list(traj_dir)
print('Find {} flow files in {}'.format(len(flow_list), traj_dir))
flow_mask_list = get_flow_mask_list(traj_dir)
print('Find {} flow mask files in {}'.format(len(flow_mask_list), traj_dir))
left_pose_file = get_posefile(traj_dir, left_right = 'left')
print('Left pose file: {}'.format(left_pose_file))
right_pose_file = get_posefile(traj_dir, left_right = 'right')
print('Right pose file: {}'.format(right_pose_file))
Veri indirme işlevleri
def read_numpy_file(numpy_file,):
'''
return a numpy array given the file path
'''
bc = container_client.get_blob_client(blob=numpy_file)
data = bc.download_blob()
ee = io.BytesIO(data.content_as_bytes())
ff = np.load(ee)
return ff
def read_image_file(image_file,):
'''
return a uint8 numpy array given the file path
'''
bc = container_client.get_blob_client(blob=image_file)
data = bc.download_blob()
ee = io.BytesIO(data.content_as_bytes())
img=cv2.imdecode(np.asarray(bytearray(ee.read()),dtype=np.uint8), cv2.IMREAD_COLOR)
im_rgb = img[:, :, [2, 1, 0]] # BGR2RGB
return im_rgb
Veri görselleştirme işlevleri
def depth2vis(depth, maxthresh = 50):
depthvis = np.clip(depth,0,maxthresh)
depthvis = depthvis/maxthresh*255
depthvis = depthvis.astype(np.uint8)
depthvis = np.tile(depthvis.reshape(depthvis.shape+(1,)), (1,1,3))
return depthvis
def seg2vis(segnp):
colors = [(205, 92, 92), (0, 255, 0), (199, 21, 133), (32, 178, 170), (233, 150, 122), (0, 0, 255), (128, 0, 0), (255, 0, 0), (255, 0, 255), (176, 196, 222), (139, 0, 139), (102, 205, 170), (128, 0, 128), (0, 255, 255), (0, 255, 255), (127, 255, 212), (222, 184, 135), (128, 128, 0), (255, 99, 71), (0, 128, 0), (218, 165, 32), (100, 149, 237), (30, 144, 255), (255, 0, 255), (112, 128, 144), (72, 61, 139), (165, 42, 42), (0, 128, 128), (255, 255, 0), (255, 182, 193), (107, 142, 35), (0, 0, 128), (135, 206, 235), (128, 0, 0), (0, 0, 255), (160, 82, 45), (0, 128, 128), (128, 128, 0), (25, 25, 112), (255, 215, 0), (154, 205, 50), (205, 133, 63), (255, 140, 0), (220, 20, 60), (255, 20, 147), (95, 158, 160), (138, 43, 226), (127, 255, 0), (123, 104, 238), (255, 160, 122), (92, 205, 92),]
segvis = np.zeros(segnp.shape+(3,), dtype=np.uint8)
for k in range(256):
mask = segnp==k
colorind = k % len(colors)
if np.sum(mask)>0:
segvis[mask,:] = colors[colorind]
return segvis
def _calculate_angle_distance_from_du_dv(du, dv, flagDegree=False):
a = np.arctan2( dv, du )
angleShift = np.pi
if ( True == flagDegree ):
a = a / np.pi * 180
angleShift = 180
# print("Convert angle from radian to degree as demanded by the input file.")
d = np.sqrt( du * du + dv * dv )
return a, d, angleShift
def flow2vis(flownp, maxF=500.0, n=8, mask=None, hueMax=179, angShift=0.0):
"""
Show a optical flow field as the KITTI dataset does.
Some parts of this function is the transform of the original MATLAB code flow_to_color.m.
"""
ang, mag, _ = _calculate_angle_distance_from_du_dv( flownp[:, :, 0], flownp[:, :, 1], flagDegree=False )
# Use Hue, Saturation, Value colour model
hsv = np.zeros( ( ang.shape[0], ang.shape[1], 3 ) , dtype=np.float32)
am = ang < 0
ang[am] = ang[am] + np.pi * 2
hsv[ :, :, 0 ] = np.remainder( ( ang + angShift ) / (2*np.pi), 1 )
hsv[ :, :, 1 ] = mag / maxF * n
hsv[ :, :, 2 ] = (n - hsv[:, :, 1])/n
hsv[:, :, 0] = np.clip( hsv[:, :, 0], 0, 1 ) * hueMax
hsv[:, :, 1:3] = np.clip( hsv[:, :, 1:3], 0, 1 ) * 255
hsv = hsv.astype(np.uint8)
rgb = cv2.cvtColor(hsv, cv2.COLOR_HSV2RGB)
if ( mask is not None ):
mask = mask > 0
rgb[mask] = np.array([0, 0 ,0], dtype=np.uint8)
return rgb
İndirme ve görselleştirme
data_ind = 173 # randomly select one frame (data_ind < TRAJ_LEN)
left_img = read_image_file(left_img_list[data_ind])
right_img = read_image_file(right_img_list[data_ind])
# Visualize the left and right RGB images
plt.figure(figsize=(12, 5))
plt.subplot(121)
plt.imshow(left_img)
plt.title('Left Image')
plt.subplot(122)
plt.imshow(right_img)
plt.title('Right Image')
plt.show()
# Visualize the left and right depth files
left_depth = read_numpy_file(left_depth_list[data_ind])
left_depth_vis = depth2vis(left_depth)
right_depth = read_numpy_file(right_depth_list[data_ind])
right_depth_vis = depth2vis(right_depth)
plt.figure(figsize=(12, 5))
plt.subplot(121)
plt.imshow(left_depth_vis)
plt.title('Left Depth')
plt.subplot(122)
plt.imshow(right_depth_vis)
plt.title('Right Depth')
plt.show()
# Visualize the left and right segmentation files
left_seg = read_numpy_file(left_seg_list[data_ind])
left_seg_vis = seg2vis(left_seg)
right_seg = read_numpy_file(right_seg_list[data_ind])
right_seg_vis = seg2vis(right_seg)
plt.figure(figsize=(12, 5))
plt.subplot(121)
plt.imshow(left_seg_vis)
plt.title('Left Segmentation')
plt.subplot(122)
plt.imshow(right_seg_vis)
plt.title('Right Segmentation')
plt.show()
# Visualize the flow and mask files
flow = read_numpy_file(flow_list[data_ind])
flow_vis = flow2vis(flow)
flow_mask = read_numpy_file(flow_mask_list[data_ind])
flow_vis_w_mask = flow2vis(flow, mask = flow_mask)
plt.figure(figsize=(12, 5))
plt.subplot(121)
plt.imshow(flow_vis)
plt.title('Optical Flow')
plt.subplot(122)
plt.imshow(flow_vis_w_mask)
plt.title('Optical Flow w/ Mask')
plt.show()
Sonraki adımlar
Açık Veri Kümeleri kataloğundaki diğer veri kümelerini görüntüleyin.