空格針腳範例
空間釘選範例中示範的功能也適用于主要世界鎖定物理範例場景。
不過,空間釘選場景提供簡化且更專注的 空間釘選功能檢視。 其目的是要更接近真實世界應用程式的內部工作,這需要將大型物件或物件與真實世界功能對齊。
因此,它缺少許多較一般 世界鎖定物理範例的選項和執行時間 UX。
預設設定
選取 WorldLocking > WorldLockingManager 節點,即可在 Unity Inspector 中檢查套用世界鎖定工具管理員設定。
特別是啟用世界鎖定工具的自動儲存和自動載入功能。 因此,在對齊球體並測量光線與真實世界特徵之後,後續的啟動時會話會自動繼續該對齊。
若要將範例重設為乾淨狀態,請將它卸載並重新部署。 當然,從腳本重設為全新平板的 API,但為了清楚起見,這裡會省略這些 API。 請參閱 IAlignmentManager.ClearAlignmentAnchors () 。
此外,示範也會啟用自動重新參考作業。 請參閱 下方。
實體空間設定
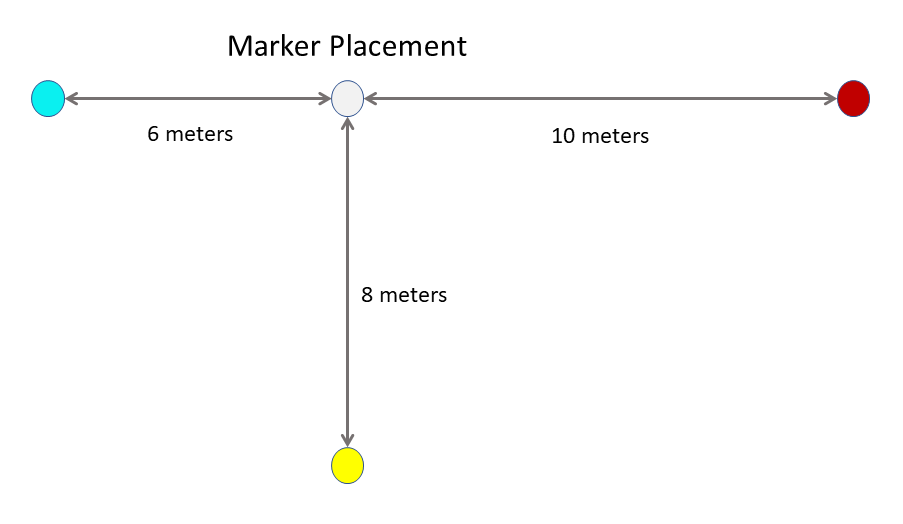
此範例包含 4 個標記。 若要完整探索範例,請將實體標記放在對應至虛擬標記配置的空間中。
注意:Unity 場景中虛擬標記的配置可能會改變,以符合任何實體空間。 預設版面配置沒有任何特殊之處。 不過,查看空間釘選功能的優點需要相當多的標記分佈,且至少分隔幾個公尺。
會議室中實體標記的配置應該符合 Unity 場景中虛擬標記的配置,如下圖所示:
執行範例
啟動
在第一個會話啟動時,Unity 座標空間的原點將會在啟動時的頭部姿勢。
向左和往前 6 公尺會顯示青色球,上方有青色立方體。
向右和後方會顯示紅色圓球和立方體,距離 10 公尺。
從原點往前移動,並回頭顯示白色球體和立方體。 超過八公尺是黃色圓球和立方體。
球體下方也有交替色彩的光線。 其用途將會在逐步解說期間變得清楚。
對齊世界
移至任何一個彩色球體。 本逐步解說會從紅色球體開始。
前往紅色球體。 球體可以使用 HL2 中的手部光線從距離擷取,或使用 HL1 來注視和捏合。 在 HL2 上,也可以手動抓取。
四處查看並尋找放置於對應于紅色球體之實體空間中的標記。 透過上述其中一種方法抓取虛擬紅球,並將其拖曳至紅球的標記。 進一步調整球體,使其與實體標記一致。
其他球體現在也已移動。 不過,其方向不會變更。 也就是說,虛擬世界已轉譯成將紅球放在其標記上,但世界的方向尚未受到影響。
移至另一個球體。 在此逐步解說中,白色球體將會是下一個。
重複上述程式,移動虛擬白色球體使其實體標記對齊。
現在虛擬空間已旋轉並轉譯,讓紅色、白色和青色球仍在一行中,而黃色球體則位於白色球體的垂直位移上。
確認在接近白色球體時,它會與其實體標記對齊。 逐步前往紅色球體,並確認其與實體標記對齊。
現在,請前往其餘球體。 本逐步解說會繼續進行青色球。
雖然青色球與紅色和白色球體一起對齊,但未正確放置在其標記上。 錯誤的確切向量和大小是裝置,甚至是相依的情況,在紅色圓球線上很可能接近正確,但實體標記的短。
將青色球拖曳至其與實體標記的正確對齊方式。 藉由逐一查看每個標記並加以檢查,確認這三個放置標記中的每一個現在在每一個位置的鄰近性中都正確對齊。
如有需要,請針對最終球體重複此程式。
替代操作模式
上述逐步解說是以應用程式中的預設組態為基礎,其中虛擬空間的方向是由標記的相對位置所隱含。
在替代模式中,可以藉由擷取球體並旋轉 Y 軸來明確設定方向。
上述預設操作模式通常比較容易,因為將物件放置在虛擬空間通常比將物件旋轉到特定方向更精確。
同樣地,使用 QR 代碼進行自動對齊時,針對 QR 代碼標記傳回的位置通常比方向更可靠。
不過,有些應用程式可能會進階和特定瞭解所需的空間方向,這些方向可能會利用這個第二種方法。
若要在示範中啟用明確的方向方法,只要停用標記球體上的作用中空間針腳可導向操作元件:
內容 > 操作 > 標記 > CyanSphere/RedSphere/YellowSphere/GreySphere。
並啟用目前停用的空間釘選操作元件。
接著,建議的逐步解說如下:
放置其中一個球體與其實體標記對齊,並將它導向,讓另一個球體位於正確的方向。
其他球體現在會位於不正確的距離,但沿著大約正確的向量。
依序移至其他球體,並重新置放每個球體,使其實體標記對齊。 不需要進一步的方向變更。
檢查結果
如果有磁帶量值之類的測量工具可供使用,則可以進一步檢查此對齊方式。
如果球體已正確放置,則每個球體都應該有零錯誤。
在球體下方執行的 T 型光線會在每個計量上替代色彩。 藉由測量測量裝置中的計量標記來測量光線中色彩變更的偏差,可能會看到空間針腳之間的區域發生錯誤。
Refit 作業
自動 refit 作業最多可能會顯示如下的資訊清單: