TartanAir: Datová sada simulace AirSim pro simultánní lokalizaci a mapování (SLAM)
Simultánní lokalizace a mapování (SLAM, Simultaneous Localization and Mapping) je jednou z nejzákladnějších funkcí nezbytných pro roboty. Vzhledem ke všudypřítomnosti obrázků se vizuální SLAM (V-SLAM) stal důležitou součástí mnoha autonomních systémů. Významného pokroku se dosáhlo u geometrických metod a metod založených na strojovém učení. Vývoj robustních a spolehlivých metod SLAM pro aplikace reálného světa ale stále představuje náročný problém. Reálná prostředí jsou plná obtížných případů, jako jsou změny světla nebo nedostatek osvětlení, dynamické objekty a scény bez textur. Tato datová sada využívá výhod pokročilých technologií počítačového zpracování obrazu a jejím cílem je pokrýt různé scénáře se simulacemi náročných funkcí.
Poznámka
Microsoft poskytuje otevřené datové sady Azure na základě "tak, jak jsou". Společnost Microsoft neposkytuje žádné záruky, výslovné ani předpokládané, záruky ani podmínky týkající se vašeho používání datových sad. V rozsahu povoleném vašimi místními zákony se společnost Microsoft zříká veškeré odpovědnosti za případné škody nebo ztráty, včetně přímých, následných, zvláštních, nepřímých, náhodných nebo trestních, vyplývajících z vašeho používání datových sad.
Na tuto datovou sadu se vztahují původní podmínky, které Microsoft přijal se zdrojovými daty. Datová sada může obsahovat data pocházející z Microsoftu.
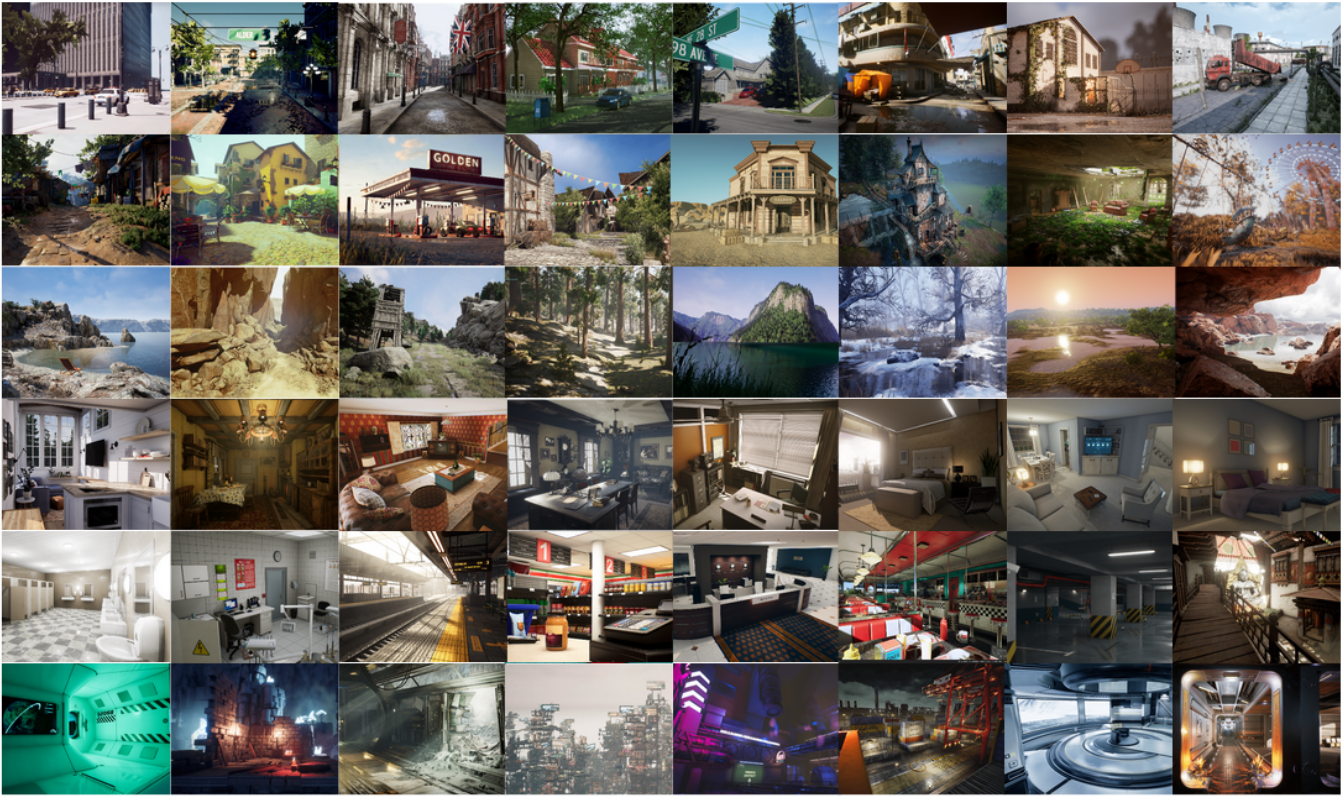
Data se shromažďují ve fotorealistických simulačních prostředích za přítomnosti různých světelných podmínek, počasí a pohyblivých objektů. Shromažďováním dat v rámci simulací jsme schopní získat multimodální senzorová data a přesné popisky „základní pravda“ (ground truth), včetně stereo obrázků RGB, obrázků s hloubkou, segmentace, optického toku a poloh kamery. Vytvořili jsme velký počet prostředí s různými styly a scénami, včetně náročných úhlů pohledu a různých vzorů pohybu, kterých by bylo obtížné dosáhnout prostřednictvím fyzických platforem shromažďování dat. Čtyři nejdůležitější funkce naší datové sady jsou: 1) Rozsáhlá různorodá realistická data; 2) Multimodální popisky základní pravdy; 3) Rozmanitost pohybových vzorů; 4) Náročné scény.
Tato datová sada poskytuje pět typů dat:
- Stereo obrázky: typ obrázku (PNG)
- Hloubkový soubor: typ numpy (NPY)
- Soubor segmentace: typ numpy (NPY)
- Soubor optického toku: typ numpy (NPY)
- Soubor pozice fotoaparátu: typ textu (TXT)
Shromažďuje se z různých prostředí a k roku 2019 obsahuje stovky trajektorií (3 TB).
Náročné vizuální efekty
V některých situacích tato datová sada simuluje několik typů náročných vizuálních efektů.
- Zhoršené světelné podmínky. Střídání dne a noci. Nízká intenzita osvětlení. Rychle se měnící osvětlení.
- Vlivy počasí. Jasná obloha, déšť, sníh, vítr a mlha.
- Změny ročních období.
Umístění úložiště
Tato datová sada se uchovává v oblasti Azure Východní USA. Kvůli přidružení se doporučuje přidělovat výpočetní prostředky v oblasti Východní USA.
Licenční podmínky
Tento projekt se vydává v rámci licence MIT. Další podrobnosti najdete v licenčním souboru .
Další informace
Prohlédni si oficiální web TartanAir nebo si prohlédni původní výzkumnou práci.
Pokud ohledně tohoto zdroje dat máte jakékoli dotazy, zašlete e-mail na adresu tartanair@hotmail.com. Můžete také oslovit přispěvatele na přidruženém GitHubu.
Citace Další technické podrobnosti jsou k dispozici v dokumentu AirSim (konference FSR 2017). Citovat jako:
@article{tartanair2020arxiv,
title = {TartanAir: A Dataset to Push the Limits of Visual SLAM},
author = {Wenshan Wang, Delong Zhu, Xiangwei Wang, Yaoyu Hu, Yuheng Qiu, Chen Wang, Yafei Hu, Ashish Kapoor, Sebastian Scherer},
journal = {arXiv preprint arXiv:2003.14338},
year = {2020},
url = {https://arxiv.org/abs/2003.14338}
}
@inproceedings{airsim2017fsr,
author = {Shital Shah and Debadeepta Dey and Chris Lovett and Ashish Kapoor},
title = {AirSim: High-Fidelity Visual and Physical Simulation for Autonomous Vehicles},
year = {2017},
booktitle = {Field and Service Robotics},
eprint = {arXiv:1705.05065},
url = {https://arxiv.org/abs/1705.05065}
}
Přístup k datům
Pro přístup k datům v poznámkovém bloku Pythonu použijte následující ukázku kódu.
Závislosti
pip install numpy
pip install azure-storage-blob
pip install opencv-python
Importy a klient kontejneru
from azure.storage.blob import ContainerClient
import numpy as np
import io
import cv2
import time
import matplotlib.pyplot as plt
%matplotlib inline
# Dataset website: http://theairlab.org/tartanair-dataset/
account_url = 'https://tartanair.blob.core.windows.net/'
container_name = 'tartanair-release1'
container_client = ContainerClient(account_url=account_url,
container_name=container_name,
credential=None)
Prostředí a trajektorie
def get_environment_list():
'''
List all the environments shown in the root directory
'''
env_gen = container_client.walk_blobs()
envlist = []
for env in env_gen:
envlist.append(env.name)
return envlist
def get_trajectory_list(envname, easy_hard = 'Easy'):
'''
List all the trajectory folders, which is named as 'P0XX'
'''
assert(easy_hard=='Easy' or easy_hard=='Hard')
traj_gen = container_client.walk_blobs(name_starts_with=envname + '/' + easy_hard+'/')
trajlist = []
for traj in traj_gen:
trajname = traj.name
trajname_split = trajname.split('/')
trajname_split = [tt for tt in trajname_split if len(tt)>0]
if trajname_split[-1][0] == 'P':
trajlist.append(trajname)
return trajlist
def _list_blobs_in_folder(folder_name):
"""
List all blobs in a virtual folder in an Azure blob container
"""
files = []
generator = container_client.list_blobs(name_starts_with=folder_name)
for blob in generator:
files.append(blob.name)
return files
def get_image_list(trajdir, left_right = 'left'):
assert(left_right == 'left' or left_right == 'right')
files = _list_blobs_in_folder(trajdir + '/image_' + left_right + '/')
files = [fn for fn in files if fn.endswith('.png')]
return files
def get_depth_list(trajdir, left_right = 'left'):
assert(left_right == 'left' or left_right == 'right')
files = _list_blobs_in_folder(trajdir + '/depth_' + left_right + '/')
files = [fn for fn in files if fn.endswith('.npy')]
return files
def get_flow_list(trajdir, ):
files = _list_blobs_in_folder(trajdir + '/flow/')
files = [fn for fn in files if fn.endswith('flow.npy')]
return files
def get_flow_mask_list(trajdir, ):
files = _list_blobs_in_folder(trajdir + '/flow/')
files = [fn for fn in files if fn.endswith('mask.npy')]
return files
def get_posefile(trajdir, left_right = 'left'):
assert(left_right == 'left' or left_right == 'right')
return trajdir + '/pose_' + left_right + '.txt'
def get_seg_list(trajdir, left_right = 'left'):
assert(left_right == 'left' or left_right == 'right')
files = _list_blobs_in_folder(trajdir + '/seg_' + left_right + '/')
files = [fn for fn in files if fn.endswith('.npy')]
return files
Seznam prostředí
envlist = get_environment_list()
print('Find {} environments..'.format(len(envlist)))
print(envlist)
Seznam jednoduchých trajektorií v prvním prostředí
diff_level = 'Easy'
env_ind = 0
trajlist = get_trajectory_list(envlist[env_ind], easy_hard = diff_level)
print('Find {} trajectories in {}'.format(len(trajlist), envlist[env_ind]+diff_level))
print(trajlist)
Výpis všech datových souborů na jedné trajektorii
traj_ind = 1
traj_dir = trajlist[traj_ind]
left_img_list = get_image_list(traj_dir, left_right = 'left')
print('Find {} left images in {}'.format(len(left_img_list), traj_dir))
right_img_list = get_image_list(traj_dir, left_right = 'right')
print('Find {} right images in {}'.format(len(right_img_list), traj_dir))
left_depth_list = get_depth_list(traj_dir, left_right = 'left')
print('Find {} left depth files in {}'.format(len(left_depth_list), traj_dir))
right_depth_list = get_depth_list(traj_dir, left_right = 'right')
print('Find {} right depth files in {}'.format(len(right_depth_list), traj_dir))
left_seg_list = get_seg_list(traj_dir, left_right = 'left')
print('Find {} left segmentation files in {}'.format(len(left_seg_list), traj_dir))
right_seg_list = get_seg_list(traj_dir, left_right = 'left')
print('Find {} right segmentation files in {}'.format(len(right_seg_list), traj_dir))
flow_list = get_flow_list(traj_dir)
print('Find {} flow files in {}'.format(len(flow_list), traj_dir))
flow_mask_list = get_flow_mask_list(traj_dir)
print('Find {} flow mask files in {}'.format(len(flow_mask_list), traj_dir))
left_pose_file = get_posefile(traj_dir, left_right = 'left')
print('Left pose file: {}'.format(left_pose_file))
right_pose_file = get_posefile(traj_dir, left_right = 'right')
print('Right pose file: {}'.format(right_pose_file))
Funkce stahování dat
def read_numpy_file(numpy_file,):
'''
return a numpy array given the file path
'''
bc = container_client.get_blob_client(blob=numpy_file)
data = bc.download_blob()
ee = io.BytesIO(data.content_as_bytes())
ff = np.load(ee)
return ff
def read_image_file(image_file,):
'''
return a uint8 numpy array given the file path
'''
bc = container_client.get_blob_client(blob=image_file)
data = bc.download_blob()
ee = io.BytesIO(data.content_as_bytes())
img=cv2.imdecode(np.asarray(bytearray(ee.read()),dtype=np.uint8), cv2.IMREAD_COLOR)
im_rgb = img[:, :, [2, 1, 0]] # BGR2RGB
return im_rgb
Funkce vizualizace dat
def depth2vis(depth, maxthresh = 50):
depthvis = np.clip(depth,0,maxthresh)
depthvis = depthvis/maxthresh*255
depthvis = depthvis.astype(np.uint8)
depthvis = np.tile(depthvis.reshape(depthvis.shape+(1,)), (1,1,3))
return depthvis
def seg2vis(segnp):
colors = [(205, 92, 92), (0, 255, 0), (199, 21, 133), (32, 178, 170), (233, 150, 122), (0, 0, 255), (128, 0, 0), (255, 0, 0), (255, 0, 255), (176, 196, 222), (139, 0, 139), (102, 205, 170), (128, 0, 128), (0, 255, 255), (0, 255, 255), (127, 255, 212), (222, 184, 135), (128, 128, 0), (255, 99, 71), (0, 128, 0), (218, 165, 32), (100, 149, 237), (30, 144, 255), (255, 0, 255), (112, 128, 144), (72, 61, 139), (165, 42, 42), (0, 128, 128), (255, 255, 0), (255, 182, 193), (107, 142, 35), (0, 0, 128), (135, 206, 235), (128, 0, 0), (0, 0, 255), (160, 82, 45), (0, 128, 128), (128, 128, 0), (25, 25, 112), (255, 215, 0), (154, 205, 50), (205, 133, 63), (255, 140, 0), (220, 20, 60), (255, 20, 147), (95, 158, 160), (138, 43, 226), (127, 255, 0), (123, 104, 238), (255, 160, 122), (92, 205, 92),]
segvis = np.zeros(segnp.shape+(3,), dtype=np.uint8)
for k in range(256):
mask = segnp==k
colorind = k % len(colors)
if np.sum(mask)>0:
segvis[mask,:] = colors[colorind]
return segvis
def _calculate_angle_distance_from_du_dv(du, dv, flagDegree=False):
a = np.arctan2( dv, du )
angleShift = np.pi
if ( True == flagDegree ):
a = a / np.pi * 180
angleShift = 180
# print("Convert angle from radian to degree as demanded by the input file.")
d = np.sqrt( du * du + dv * dv )
return a, d, angleShift
def flow2vis(flownp, maxF=500.0, n=8, mask=None, hueMax=179, angShift=0.0):
"""
Show a optical flow field as the KITTI dataset does.
Some parts of this function is the transform of the original MATLAB code flow_to_color.m.
"""
ang, mag, _ = _calculate_angle_distance_from_du_dv( flownp[:, :, 0], flownp[:, :, 1], flagDegree=False )
# Use Hue, Saturation, Value colour model
hsv = np.zeros( ( ang.shape[0], ang.shape[1], 3 ) , dtype=np.float32)
am = ang < 0
ang[am] = ang[am] + np.pi * 2
hsv[ :, :, 0 ] = np.remainder( ( ang + angShift ) / (2*np.pi), 1 )
hsv[ :, :, 1 ] = mag / maxF * n
hsv[ :, :, 2 ] = (n - hsv[:, :, 1])/n
hsv[:, :, 0] = np.clip( hsv[:, :, 0], 0, 1 ) * hueMax
hsv[:, :, 1:3] = np.clip( hsv[:, :, 1:3], 0, 1 ) * 255
hsv = hsv.astype(np.uint8)
rgb = cv2.cvtColor(hsv, cv2.COLOR_HSV2RGB)
if ( mask is not None ):
mask = mask > 0
rgb[mask] = np.array([0, 0 ,0], dtype=np.uint8)
return rgb
Stažení a vizualizace
data_ind = 173 # randomly select one frame (data_ind < TRAJ_LEN)
left_img = read_image_file(left_img_list[data_ind])
right_img = read_image_file(right_img_list[data_ind])
# Visualize the left and right RGB images
plt.figure(figsize=(12, 5))
plt.subplot(121)
plt.imshow(left_img)
plt.title('Left Image')
plt.subplot(122)
plt.imshow(right_img)
plt.title('Right Image')
plt.show()
# Visualize the left and right depth files
left_depth = read_numpy_file(left_depth_list[data_ind])
left_depth_vis = depth2vis(left_depth)
right_depth = read_numpy_file(right_depth_list[data_ind])
right_depth_vis = depth2vis(right_depth)
plt.figure(figsize=(12, 5))
plt.subplot(121)
plt.imshow(left_depth_vis)
plt.title('Left Depth')
plt.subplot(122)
plt.imshow(right_depth_vis)
plt.title('Right Depth')
plt.show()
# Visualize the left and right segmentation files
left_seg = read_numpy_file(left_seg_list[data_ind])
left_seg_vis = seg2vis(left_seg)
right_seg = read_numpy_file(right_seg_list[data_ind])
right_seg_vis = seg2vis(right_seg)
plt.figure(figsize=(12, 5))
plt.subplot(121)
plt.imshow(left_seg_vis)
plt.title('Left Segmentation')
plt.subplot(122)
plt.imshow(right_seg_vis)
plt.title('Right Segmentation')
plt.show()
# Visualize the flow and mask files
flow = read_numpy_file(flow_list[data_ind])
flow_vis = flow2vis(flow)
flow_mask = read_numpy_file(flow_mask_list[data_ind])
flow_vis_w_mask = flow2vis(flow, mask = flow_mask)
plt.figure(figsize=(12, 5))
plt.subplot(121)
plt.imshow(flow_vis)
plt.title('Optical Flow')
plt.subplot(122)
plt.imshow(flow_vis_w_mask)
plt.title('Optical Flow w/ Mask')
plt.show()
Další kroky
Zobrazte zbytek datových sad v katalogu Otevřít datové sady.