Azure Kinect DK coordinate systems
In this article, we describe conventions used for 2D and 3D coordinate systems. There are separate coordinate systems associated with each sensor's device and the calibration functions allowed to transform points between them. The transformation functions transform entire images between coordinate systems.
2D coordinate systems
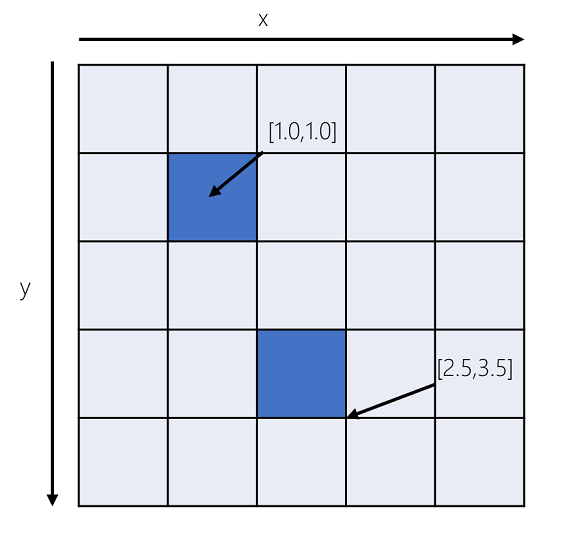
Both depth and color cameras are associated with an independent 2D coordinate system. An [x,y]-coordinate is represented in units of pixels where x ranges from 0 to width-1 and y ranges from 0 to height-1. Width and height depend on the chosen mode in which depth and color cameras are operated. The pixel coordinate [0,0] corresponds to the top-left pixel of the image. Pixel coordinates can be fractional representing subpixel coordinates.
The 2D coordinate system is 0-centered, that is, the subpixel coordinate [0.0, 0.0] represents the center and [0.5,0.5] the bottom-right corner of the pixel, as shown below.
3D coordinate systems
Each camera, the accelerometer, and the gyroscope, are associated with an independent 3D coordinate space system.
Points in the 3D-coordinate systems are represented as metric [X,Y,Z]-coordinate triplets with units in millimeters.
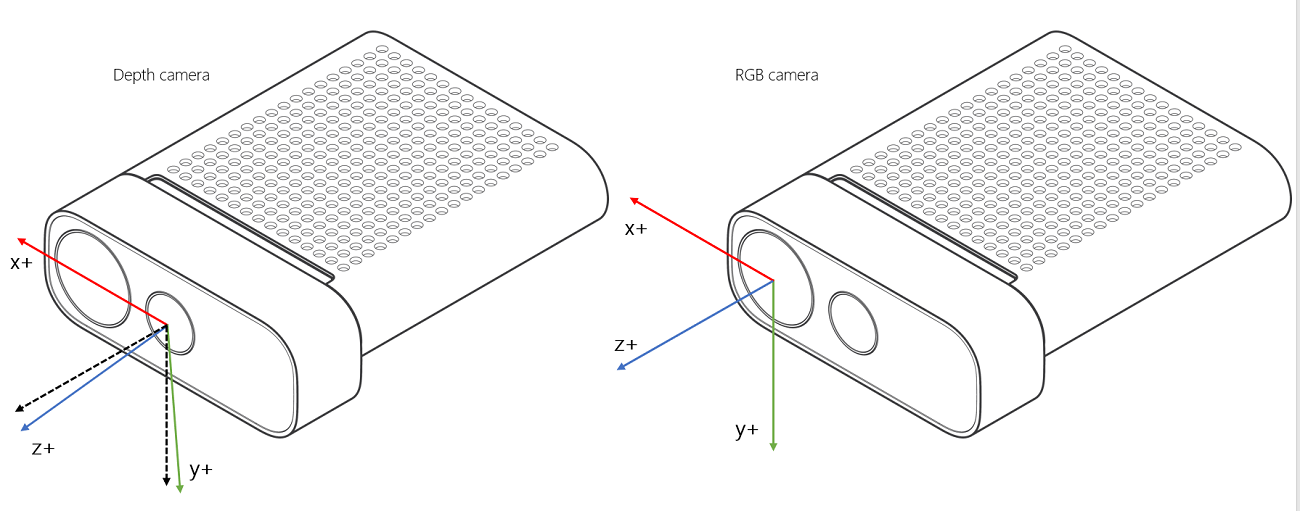
Depth and color camera
The origin [0,0,0] is located at the focal point of the camera. The coordinate system is oriented such that the positive X-axis points right, the positive Y-axis points down, and the positive Z-axis points forward.
The depth camera is tilted 6 degrees downwards of the color camera, as shown below.
There are two illuminators used by the depth camera. The illuminator used in narrow field-of-view (NFOV) modes is aligned with the depth camera case, so, the illuminator is not tilted. The illuminator used in wide field-of-view (WFOV) modes is tilted an additional 1.3 degrees downward relative to the depth camera.
Gyroscope and accelerometer
The gyroscope's origin [0,0,0] is identical to the origin of the depth camera. The origin of the accelerometer coincides with its physical location. Both the accelerometer and gyroscope coordinate systems are right-handed. The coordinate system's positive X-axis points backward, the positive Y-axis points left, and the positive Z-axis points down, as shown below.

Next Steps
Feedback
Coming soon: Throughout 2024 we will be phasing out GitHub Issues as the feedback mechanism for content and replacing it with a new feedback system. For more information see: https://aka.ms/ContentUserFeedback.
Submit and view feedback for