Simulação de percepção
Deseja criar um teste automatizado para seu aplicativo? Deseja que seus testes vão além do teste de unidade no nível do componente e realmente exerçam seu aplicativo de ponta a ponta? A Simulação de Percepção é o que você está procurando. A biblioteca de Simulação de Percepção envia dados de entrada humanos e mundiais para seu aplicativo para que você possa automatizar seus testes. Por exemplo, você pode simular a entrada de um humano olhando para uma posição específica e repetível e, em seguida, usar um gesto ou controlador de movimento.
A Simulação de Percepção pode enviar entrada simulada como esta para um HoloLens físico, o emulador do HoloLens (primeira geração), o Emulador de HoloLens 2 ou um computador com Realidade Misturada Portal instalado. A Simulação de Percepção ignora os sensores dinâmicos em um dispositivo Realidade Misturada e envia entrada simulada para aplicativos em execução no dispositivo. Os aplicativos recebem esses eventos de entrada por meio das mesmas APIs que sempre usam e não conseguem diferenciar a diferença entre a execução com sensores reais versus a Simulação de Percepção. A Simulação de Percepção é a mesma tecnologia usada pelos emuladores do HoloLens para enviar entrada simulada para a Máquina Virtual do HoloLens.
Para começar a usar a simulação em seu código, comece criando um objeto IPerceptionSimulationManager. Nesse objeto, você pode emitir comandos para controlar as propriedades de um "humano" simulado, incluindo posição da cabeça, posição da mão e gestos. Você também pode habilitar e manipular controladores de movimento.
Configurando um projeto do Visual Studio para simulação de percepção
Instale o emulador do HoloLens no computador de desenvolvimento. O emulador inclui as bibliotecas que você usa para a Simulação de Percepção.
Crie um novo projeto de área de trabalho do Visual Studio C# (um Projeto de Console funciona muito bem para começar).
Adicione os binários a seguir ao seu projeto como referências (Project-Add-Reference>>...). Você pode encontrá-los em %ProgramFiles(x86)%\Microsoft XDE\(version), como %ProgramFiles(x86)%\Microsoft XDE\10.0.18362.0 para o Emulador HoloLens 2.
Observação
Embora os binários façam parte do Emulador HoloLens 2, eles também funcionam para Windows Mixed Reality na área de trabalho.)
a. PerceptionSimulationManager.Interop.dll – wrapper C# gerenciado para Simulação de Percepção.
b. PerceptionSimulationRest.dll – Biblioteca para configurar um canal de comunicação de soquete da Web para o HoloLens ou emulador.
c. SimulationStream.Interop.dll - Tipos compartilhados para simulação.Adicionar o PerceptionSimulationManager.dll binário de implementação ao seu projeto
a. Primeiro adicione-o como um binário ao projeto (Project-Add-Existing>> Item...). Salve-o como um link para que ele não o copie para a pasta de origem do projeto.
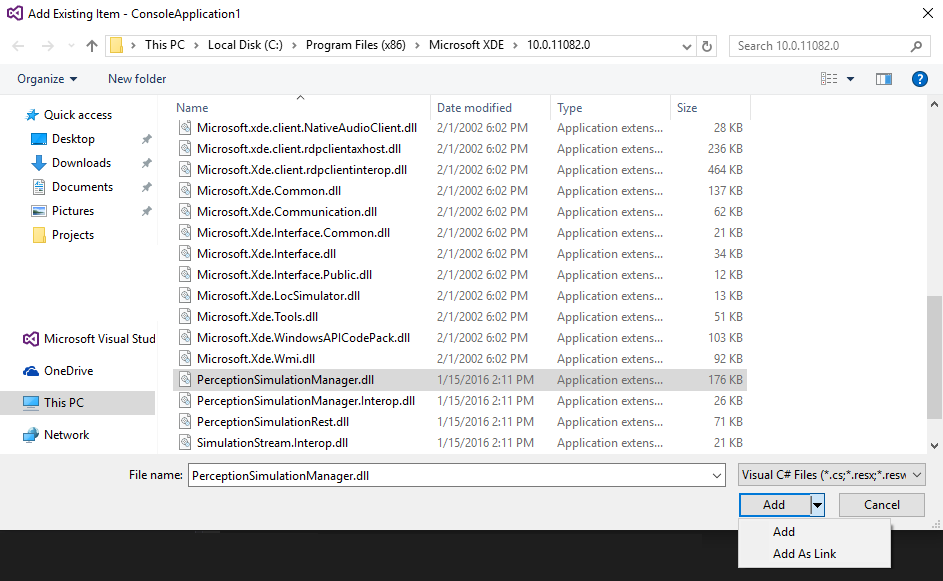
b. Em seguida, certifique-se de que ele seja copiado para sua pasta de saída no build. Isso está na folha de propriedades do binário.

Defina sua plataforma de solução ativa como x64. (Use o Configuration Manager para criar uma entrada de Plataforma para x64 se ainda não existir.)
Criando um objeto IPerceptionSimulation Manager
Para controlar a simulação, você emitirá atualizações para objetos recuperados de um objeto IPerceptionSimulationManager. A primeira etapa é obter esse objeto e conectá-lo ao seu dispositivo ou emulador de destino. Você pode obter o endereço IP do emulador clicando no botão Portal do Dispositivo na barra de ferramentas
 do Dispositivo Abra o Portal do Dispositivo: abra o Portal de Dispositivos do Windows para o sistema operacional HoloLens no emulador. Para Windows Mixed Reality, isso pode ser recuperado no aplicativo Configurações em "Atualizar & Segurança", em seguida, "Para desenvolvedores" na seção "Conectar usando:" em "Habilitar Portal do Dispositivo". Lembre-se de observar o endereço IP e a porta.
do Dispositivo Abra o Portal do Dispositivo: abra o Portal de Dispositivos do Windows para o sistema operacional HoloLens no emulador. Para Windows Mixed Reality, isso pode ser recuperado no aplicativo Configurações em "Atualizar & Segurança", em seguida, "Para desenvolvedores" na seção "Conectar usando:" em "Habilitar Portal do Dispositivo". Lembre-se de observar o endereço IP e a porta.
Primeiro, você chamará RestSimulationStreamSink.Create para obter um objeto RestSimulationStreamSink. Esse é o dispositivo ou emulador de destino que você controlará sobre uma conexão http. Seus comandos serão passados e manipulados pelo Portal de Dispositivos do Windows em execução no dispositivo ou emulador. Os quatro parâmetros que você precisará para criar um objeto são:
- Uri uri – endereço IP do dispositivo de destino (por exemplo, "https://123.123.123.123" ou "https://123.123.123.123:50080")
- Credenciais do System.Net.NetworkCredential – Nome de usuário/senha para se conectar ao Portal de Dispositivos do Windows no dispositivo ou emulador de destino. Se você estiver se conectando ao emulador por meio de seu endereço local (por exemplo, 168... *) no mesmo computador, todas as credenciais serão aceitas.
- bool normal - True para prioridade normal, false para baixa prioridade. Geralmente, você deseja definir isso como true para cenários de teste, o que permite que seu teste assuma o controle. O emulador e a simulação de Windows Mixed Reality usam conexões de baixa prioridade. Se o teste também usar uma conexão de baixa prioridade, a conexão estabelecida mais recentemente estará no controle.
- Token System.Threading.CancellationToken – Token para cancelar a operação assíncrona.
Em segundo lugar, você criará o IPerceptionSimulationManager. Esse é o objeto que você usa para controlar a simulação. Isso também deve ser feito em um método assíncrono.
Controlar o humano simulado
Um IPerceptionSimulationManager tem uma propriedade Human que retorna um objeto ISimulatedHuman. Para controlar o humano simulado, execute operações neste objeto. Por exemplo:
manager.Human.Move(new Vector3(0.1f, 0.0f, 0.0f))
Aplicativo de console C# de exemplo básico
using System;
using System.Collections.Generic;
using System.Linq;
using System.Text;
using System.Threading;
using System.Threading.Tasks;
using Microsoft.PerceptionSimulation;
namespace ConsoleApplication1
{
class Program
{
static void Main(string[] args)
{
Task.Run(async () =>
{
RestSimulationStreamSink sink = null;
CancellationToken token = new System.Threading.CancellationToken();
try
{
sink = await RestSimulationStreamSink.Create(
// use the IP address for your device/emulator
new Uri("https://169.254.227.115"),
// no credentials are needed for the emulator
new System.Net.NetworkCredential("", ""),
// normal priorty
true,
// cancel token
token);
IPerceptionSimulationManager manager = PerceptionSimulationManager.CreatePerceptionSimulationManager(sink);
}
catch (Exception e)
{
Console.WriteLine(e);
}
// Always close the sink to return control to the previous application.
if (sink != null)
{
await sink.Close(token);
}
});
// If main exits, the process exits.
Console.WriteLine("Press any key to exit...");
Console.ReadLine();
}
}
}
Aplicativo de console C# de exemplo estendido
using System;
using System.Collections.Generic;
using System.Linq;
using System.Text;
using System.Threading;
using System.Threading.Tasks;
using Microsoft.PerceptionSimulation;
namespace ConsoleApplication1
{
class Program
{
static void Main(string[] args)
{
RestSimulationStreamSink sink = null;
CancellationToken token = new System.Threading.CancellationToken();
Task.Run(async () =>
{
try
{
sink = await RestSimulationStreamSink.Create(
// use the IP address for your device/emulator
new Uri("https://169.254.227.115"),
// no credentials are needed for the emulator
new System.Net.NetworkCredential("", ""),
// normal priorty
true,
// cancel token
token);
IPerceptionSimulationManager manager = PerceptionSimulationManager.CreatePerceptionSimulationManager(sink);
// Now, we'll simulate a sequence of actions.
// Sleeps in-between each action give time to the system
// to be able to properly react.
// This is just an example. A proper automated test should verify
// that the app has behaved correctly
// before proceeding to the next step, instead of using Sleeps.
// Activate the right hand
manager.Human.RightHand.Activated = true;
// Simulate Bloom gesture, which should cause Shell to disappear
manager.Human.RightHand.PerformGesture(SimulatedGesture.Home);
Thread.Sleep(2000);
// Simulate Bloom gesture again... this time, Shell should reappear
manager.Human.RightHand.PerformGesture(SimulatedGesture.Home);
Thread.Sleep(2000);
// Simulate a Head rotation down around the X axis
// This should cause gaze to aim about the center of the screen
manager.Human.Head.Rotate(new Rotation3(0.04f, 0.0f, 0.0f));
Thread.Sleep(300);
// Simulate a finger press & release
// Should cause a tap on the center tile, thus launching it
manager.Human.RightHand.PerformGesture(SimulatedGesture.FingerPressed);
Thread.Sleep(300);
manager.Human.RightHand.PerformGesture(SimulatedGesture.FingerReleased);
Thread.Sleep(2000);
// Simulate a second finger press & release
// Should activate the app that was launched when the center tile was clicked
manager.Human.RightHand.PerformGesture(SimulatedGesture.FingerPressed);
Thread.Sleep(300);
manager.Human.RightHand.PerformGesture(SimulatedGesture.FingerReleased);
Thread.Sleep(5000);
// Simulate a Head rotation towards the upper right corner
manager.Human.Head.Rotate(new Rotation3(-0.14f, 0.17f, 0.0f));
Thread.Sleep(300);
// Simulate a third finger press & release
// Should press the Remove button on the app
manager.Human.RightHand.PerformGesture(SimulatedGesture.FingerPressed);
Thread.Sleep(300);
manager.Human.RightHand.PerformGesture(SimulatedGesture.FingerReleased);
Thread.Sleep(2000);
// Simulate Bloom gesture again... bringing the Shell back once more
manager.Human.RightHand.PerformGesture(SimulatedGesture.Home);
Thread.Sleep(2000);
}
catch (Exception e)
{
Console.WriteLine(e);
}
});
// If main exits, the process exits.
Console.WriteLine("Press any key to exit...");
Console.ReadLine();
// Always close the sink to return control to the previous application.
if (sink != null)
{
sink.Close(token);
}
}
}
}
Observação em controladores 6-DOF
Antes de chamar quaisquer propriedades em métodos em um controlador simulado de 6 DOF, você deve ativar o controlador. Não fazer isso resultará em uma exceção. A partir do Atualização de maio de 2019 para o Windows 10, os controladores simulados de 6 DOF podem ser instalados e ativados definindo a propriedade Status no objeto ISimulatedSixDofController como SimulatedSixDofControllerStatus.Active. No Atualização de outubro de 2018 para o Windows 10 e anteriores, você deve instalar separadamente um controlador simulado de 6 DOF primeiro chamando a ferramenta PerceptionSimulationDevice localizada na pasta \Windows\System32. O uso dessa ferramenta é o seguinte:
PerceptionSimulationDevice.exe <action> 6dof <instance>
Por exemplo
PerceptionSimulationDevice.exe i 6dof 1
As ações com suporte são:
- i = install
- q = consulta
- r = remover
As instâncias com suporte são:
- 1 = o controlador 6-DOF esquerdo
- 2 = o controlador 6 DOF correto
O código de saída do processo indicará êxito (um valor de retorno zero) ou falha (um valor retornado diferente de zero). Ao usar a ação 'q' para consultar se um controlador está instalado, o valor retornado será zero (0) se o controlador ainda não estiver instalado ou um (1) se o controlador estiver instalado.
Ao remover um controlador no Atualização de outubro de 2018 para o Windows 10 ou anterior, defina seu status como Desativado por meio da API primeiro e, em seguida, chame a ferramenta PerceptionSimulationDevice.
Essa ferramenta deve ser executada como Administrador.
Referência de API
Microsoft.PerceptionSimulation.SimulatedDeviceType
Descreve um tipo de dispositivo simulado
public enum SimulatedDeviceType
{
Reference = 0
}
Microsoft.PerceptionSimulation.SimulatedDeviceType.Reference
Um dispositivo de referência fictício, o padrão para PerceptionSimulationManager
Microsoft.PerceptionSimulation.HeadTrackerMode
Descreve um modo de rastreador de cabeçalho
public enum HeadTrackerMode
{
Default = 0,
Orientation = 1,
Position = 2
}
Microsoft.PerceptionSimulation.HeadTrackerMode.Default
Acompanhamento de cabeçalho padrão. Isso significa que o sistema pode selecionar o melhor modo de acompanhamento de cabeçalho com base em condições de runtime.
Microsoft.PerceptionSimulation.HeadTrackerMode.Orientation
Somente acompanhamento de cabeçalho de orientação. Isso significa que a posição controlada pode não ser confiável e algumas funcionalidades dependentes da posição da cabeça podem não estar disponíveis.
Microsoft.PerceptionSimulation.HeadTrackerMode.Position
Controle de cabeça posicional. Isso significa que a posição e a orientação da cabeça controladas são confiáveis
Microsoft.PerceptionSimulation.SimulatedGesture
Descreve um gesto simulado
public enum SimulatedGesture
{
None = 0,
FingerPressed = 1,
FingerReleased = 2,
Home = 4,
Max = Home
}
Microsoft.PerceptionSimulation.SimulatedGesture.None
Um valor sentinela usado para indicar nenhum gesto.
Microsoft.PerceptionSimulation.SimulatedGesture.FingerPressed
Um gesto pressionado pelo dedo.
Microsoft.PerceptionSimulation.SimulatedGesture.FingerReleased
Um gesto de liberação de dedo.
Microsoft.PerceptionSimulation.SimulatedGesture.Home
O gesto de início/sistema.
Microsoft.PerceptionSimulation.SimulatedGesture.Max
O gesto máximo válido.
Microsoft.PerceptionSimulation.SimulatedSixDofControllerStatus
Os estados possíveis de um controlador simulado de 6 DOF.
public enum SimulatedSixDofControllerStatus
{
Off = 0,
Active = 1,
TrackingLost = 2,
}
Microsoft.PerceptionSimulation.SimulatedSixDofControllerStatus.Off
O controlador 6-DOF está desativado.
Microsoft.PerceptionSimulation.SimulatedSixDofControllerStatus.Active
O controlador 6-DOF está ativado e rastreado.
Microsoft.PerceptionSimulation.SimulatedSixDofControllerStatus.TrackingLost
O controlador 6-DOF está ativado, mas não pode ser rastreado.
Microsoft.PerceptionSimulation.SimulatedSixDofControllerButton
Os botões com suporte em um controlador simulado de 6 DOF.
public enum SimulatedSixDofControllerButton
{
None = 0,
Home = 1,
Menu = 2,
Grip = 4,
TouchpadPress = 8,
Select = 16,
TouchpadTouch = 32,
Thumbstick = 64,
Max = Thumbstick
}
Microsoft.PerceptionSimulation.SimulatedSixDofControllerButton.None
Um valor sentinela usado para indicar nenhum botão.
Microsoft.PerceptionSimulation.SimulatedSixDofControllerButton.Home
O botão Página Inicial é pressionado.
Microsoft.PerceptionSimulation.SimulatedSixDofControllerButton.Menu
O botão Menu é pressionado.
Microsoft.PerceptionSimulation.SimulatedSixDofControllerButton.Grip
O botão Grip é pressionado.
Microsoft.PerceptionSimulation.SimulatedSixDofControllerButton.TouchpadPress
O TouchPad é pressionado.
Microsoft.PerceptionSimulation.SimulatedSixDofControllerButton.Select
O botão Selecionar é pressionado.
Microsoft.PerceptionSimulation.SimulatedSixDofControllerButton.TouchpadTouch
O TouchPad é tocado.
Microsoft.PerceptionSimulation.SimulatedSixDofControllerButton.Thumbstick
O thumbstick é pressionado.
Microsoft.PerceptionSimulation.SimulatedSixDofControllerButton.Max
O botão máximo válido.
Microsoft.PerceptionSimulation.SimulatedEyesCalibrationState
O estado de calibragem dos olhos simulados
public enum SimulatedGesture
{
Unavailable = 0,
Ready = 1,
Configuring = 2,
UserCalibrationNeeded = 3
}
Microsoft.PerceptionSimulation.SimulatedEyesCalibrationState.Unavailable
A calibragem de olhos não está disponível.
Microsoft.PerceptionSimulation.SimulatedEyesCalibrationState.Ready
Os olhos foram calibrados. Esse é o valor padrão.
Microsoft.PerceptionSimulation.SimulatedEyesCalibrationState.Configuring
Os olhos estão sendo calibrados.
Microsoft.PerceptionSimulation.SimulatedEyesCalibrationState.UserCalibrationNeeded
Os olhos precisam ser calibrados.
Microsoft.PerceptionSimulation.SimulatedHandJointTrackingAccuracy
A precisão de acompanhamento de uma articulação da mão.
public enum SimulatedHandJointTrackingAccuracy
{
Unavailable = 0,
Approximate = 1,
Visible = 2
}
Microsoft.PerceptionSimulation.SimulatedHandJointTrackingAccuracy.Unavailable
A articulação não é rastreada.
Microsoft.PerceptionSimulation.SimulatedHandJointTrackingAccuracy.Approximate
A posição conjunta é inferida.
Microsoft.PerceptionSimulation.SimulatedHandJointTrackingAccuracy.Visible
A articulação é totalmente controlada.
Microsoft.PerceptionSimulation.SimulatedHandPose
A precisão de acompanhamento de uma articulação da mão.
public enum SimulatedHandPose
{
Closed = 0,
Open = 1,
Point = 2,
Pinch = 3,
Max = Pinch
}
Microsoft.PerceptionSimulation.SimulatedHandPose.Closed
As articulações dos dedos da mão são configuradas para refletir uma pose fechada.
Microsoft.PerceptionSimulation.SimulatedHandPose.Open
As articulações dos dedos da mão são configuradas para refletir uma pose aberta.
Microsoft.PerceptionSimulation.SimulatedHandPose.Point
As articulações dos dedos da mão são configuradas para refletir uma pose apontando.
Microsoft.PerceptionSimulation.SimulatedHandPose.Pinch
As articulações dos dedos da mão são configuradas para refletir uma pose de pinçamento.
Microsoft.PerceptionSimulation.SimulatedHandPose.Max
O valor máximo válido para SimulatedHandPose.
Microsoft.PerceptionSimulation.PlaybackState
Descreve o estado de uma reprodução.
public enum PlaybackState
{
Stopped = 0,
Playing = 1,
Paused = 2,
End = 3,
}
Microsoft.PerceptionSimulation.PlaybackState.Stopped
No momento, a gravação está interrompida e pronta para reprodução.
Microsoft.PerceptionSimulation.PlaybackState.Playing
A gravação está sendo reproduzida no momento.
Microsoft.PerceptionSimulation.PlaybackState.Paused
A gravação está em pausa no momento.
Microsoft.PerceptionSimulation.PlaybackState.End
A gravação chegou ao fim.
Microsoft.PerceptionSimulation.Vector3
Descreve um vetor de três componentes, que pode descrever um ponto ou um vetor no espaço 3D.
public struct Vector3
{
public float X;
public float Y;
public float Z;
public Vector3(float x, float y, float z);
}
Microsoft.PerceptionSimulation.Vector3.X
O componente X do vetor.
Microsoft.PerceptionSimulation.Vector3.Y
O componente Y do vetor.
Microsoft.PerceptionSimulation.Vector3.Z
O componente Z do vetor.
Microsoft.PerceptionSimulation.Vector3.#ctor(System.Single,System.Single,System.Single)
Construa um novo Vector3.
Parâmetros
- x – o componente x do vetor.
- y – o componente y do vetor.
- z – o componente z do vetor.
Microsoft.PerceptionSimulation.Rotation3
Descreve uma rotação de três componentes.
public struct Rotation3
{
public float Pitch;
public float Yaw;
public float Roll;
public Rotation3(float pitch, float yaw, float roll);
}
Microsoft.PerceptionSimulation.Rotation3.Pitch
O componente Pitch da Rotação, para baixo ao redor do eixo X.
Microsoft.PerceptionSimulation.Rotation3.Yaw
O componente Yaw da Rotação, ao redor do eixo Y.
Microsoft.PerceptionSimulation.Rotation3.Roll
O componente Roll da Rotação, ao redor do eixo Z.
Microsoft.PerceptionSimulation.Rotation3.#ctor(System.Single,System.Single,System.Single)
Construa um novo Rotation3.
Parâmetros
- pitch – o componente de pitch da Rotação.
- yaw – o componente yaw da Rotação.
- roll – o componente roll da Rotação.
Microsoft.PerceptionSimulation.SimulatedHandJointConfiguration
Descreve a configuração de uma articulação em uma mão simulada.
public struct SimulatedHandJointConfiguration
{
public Vector3 Position;
public Rotation3 Rotation;
public SimulatedHandJointTrackingAccuracy TrackingAccuracy;
}
Microsoft.PerceptionSimulation.SimulatedHandJointConfiguration.Position
A posição da articulação.
Microsoft.PerceptionSimulation.SimulatedHandJointConfiguration.Rotation
A rotação da articulação.
Microsoft.PerceptionSimulation.SimulatedHandJointConfiguration.TrackingAccuracy
A precisão de acompanhamento da articulação.
Microsoft.PerceptionSimulation.Frustum
Descreve um frusto de exibição, como normalmente usado por uma câmera.
public struct Frustum
{
float Near;
float Far;
float FieldOfView;
float AspectRatio;
}
Microsoft.PerceptionSimulation.Frustum.Near
A distância mínima contida no frusto.
Microsoft.PerceptionSimulation.Frustum.Far
A distância máxima contida no frusto.
Microsoft.PerceptionSimulation.Frustum.FieldOfView
O campo de exibição horizontal do frusto, em radianos (menor que PI).
Microsoft.PerceptionSimulation.Frustum.AspectRatio
A proporção do campo de exibição horizontal para o campo de exibição vertical.
Microsoft.PerceptionSimulation.SimulatedDisplayConfiguration
Descreve a configuração da exibição do headset simulado.
public struct SimulatedDisplayConfiguration
{
public Vector3 LeftEyePosition;
public Rotation3 LeftEyeRotation;
public Vector3 RightEyePosition;
public Rotation3 RightEyeRotation;
public float Ipd;
public bool ApplyEyeTransforms;
public bool ApplyIpd;
}
Microsoft.PerceptionSimulation.SimulatedDisplayConfiguration.LeftEyePosition
A transformação do centro da cabeça para o olho esquerdo para fins de renderização estéreo.
Microsoft.PerceptionSimulation.SimulatedDisplayConfiguration.LeftEyeRotation
A rotação do olho esquerdo para fins de renderização estéreo.
Microsoft.PerceptionSimulation.SimulatedDisplayConfiguration.RightEyePosition
A transformação do centro da cabeça para o olho direito para fins de renderização estéreo.
Microsoft.PerceptionSimulation.SimulatedDisplayConfiguration.RightEyeRotation
A rotação do olho direito para fins de renderização estéreo.
Microsoft.PerceptionSimulation.SimulatedDisplayConfiguration.Ipd
O valor de Ipd relatado pelo sistema para fins de renderização estéreo.
Microsoft.PerceptionSimulation.SimulatedDisplayConfiguration.ApplyEyeTransforms
Se os valores fornecidos para transformações de olho esquerdo e direito devem ser considerados válidos e aplicados ao sistema em execução.
Microsoft.PerceptionSimulation.SimulatedDisplayConfiguration.ApplyIpd
Se o valor fornecido para Ipd deve ser considerado válido e aplicado ao sistema em execução.
Microsoft.PerceptionSimulation.IPerceptionSimulationManager
Raiz para gerar os pacotes usados para controlar um dispositivo.
public interface IPerceptionSimulationManager
{
ISimulatedDevice Device { get; }
ISimulatedHuman Human { get; }
void Reset();
}
Microsoft.PerceptionSimulation.IPerceptionSimulationManager.Device
Recupere o objeto de dispositivo simulado que interpreta o humano simulado e o mundo simulado.
Microsoft.PerceptionSimulation.IPerceptionSimulationManager.Human
Recupere o objeto que controla o humano simulado.
Microsoft.PerceptionSimulation.IPerceptionSimulationManager.Reset
Redefine a simulação para seu estado padrão.
Microsoft.PerceptionSimulation.ISimulatedDevice
Interface que descreve o dispositivo, que interpreta o mundo simulado e o humano simulado
public interface ISimulatedDevice
{
ISimulatedHeadTracker HeadTracker { get; }
ISimulatedHandTracker HandTracker { get; }
void SetSimulatedDeviceType(SimulatedDeviceType type);
}
Microsoft.PerceptionSimulation.ISimulatedDevice.HeadTracker
Recupere o head tracker do dispositivo simulado.
Microsoft.PerceptionSimulation.ISimulatedDevice.HandTracker
Recupere o Rastreador de Mãos do Dispositivo Simulado.
Microsoft.PerceptionSimulation.ISimulatedDevice.SetSimulatedDeviceType(Microsoft.PerceptionSimulation.SimulatedDeviceType)
Defina as propriedades do dispositivo simulado para corresponder ao tipo de dispositivo fornecido.
Parâmetros
- type – O novo tipo de Dispositivo Simulado
Microsoft.PerceptionSimulation.ISimulatedDevice2
Propriedades adicionais estão disponíveis convertendo ISimulatedDevice em ISimulatedDevice2
public interface ISimulatedDevice2
{
bool IsUserPresent { [return: MarshalAs(UnmanagedType.Bool)] get; [param: MarshalAs(UnmanagedType.Bool)] set; }
SimulatedDisplayConfiguration DisplayConfiguration { get; set; }
};
Microsoft.PerceptionSimulation.ISimulatedDevice2.IsUserPresent
Recupere ou defina se o humano simulado está usando ou não o fone de ouvido ativamente.
Microsoft.PerceptionSimulation.ISimulatedDevice2.DisplayConfiguration
Recupere ou defina as propriedades da exibição simulada.
Microsoft.PerceptionSimulation.ISimulatedHeadTracker
Interface que descreve a parte do dispositivo simulado que rastreia a cabeça do humano simulado.
public interface ISimulatedHeadTracker
{
HeadTrackerMode HeadTrackerMode { get; set; }
};
Microsoft.PerceptionSimulation.ISimulatedHeadTracker.HeadTrackerMode
Recupera e define o modo de rastreador principal atual.
Microsoft.PerceptionSimulation.ISimulatedHandTracker
Interface que descreve a parte do dispositivo simulado que rastreia as mãos do humano simulado
public interface ISimulatedHandTracker
{
Vector3 WorldPosition { get; }
Vector3 Position { get; set; }
float Pitch { get; set; }
bool FrustumIgnored { [return: MarshalAs(UnmanagedType.Bool)] get; [param: MarshalAs(UnmanagedType.Bool)] set; }
Frustum Frustum { get; set; }
}
Microsoft.PerceptionSimulation.ISimulatedHandTracker.WorldPosition
Recupere a posição do nó com relação ao mundo, em metros.
Microsoft.PerceptionSimulation.ISimulatedHandTracker.Position
Recupere e defina a posição do rastreador de mão simulado, em relação ao centro da cabeça.
Microsoft.PerceptionSimulation.ISimulatedHandTracker.Pitch
Recupere e defina o tom para baixo do rastreador de mão simulado.
Microsoft.PerceptionSimulation.ISimulatedHandTracker.FrustumIgnored
Recupere e defina se o frusto do rastreador de mão simulado é ignorado. Quando ignorados, ambas as mãos são sempre visíveis. Quando as mãos não ignoradas (o padrão) só ficam visíveis quando estão dentro do frusto do rastreador de mão.
Microsoft.PerceptionSimulation.ISimulatedHandTracker.Frustum
Recupere e defina as propriedades de frusto usadas para determinar se as mãos estão visíveis para o rastreador de mão simulado.
Microsoft.PerceptionSimulation.ISimulatedHuman
Interface de nível superior para controlar o humano simulado.
public interface ISimulatedHuman
{
Vector3 WorldPosition { get; set; }
float Direction { get; set; }
float Height { get; set; }
ISimulatedHand LeftHand { get; }
ISimulatedHand RightHand { get; }
ISimulatedHead Head { get; }s
void Move(Vector3 translation);
void Rotate(float radians);
}
Microsoft.PerceptionSimulation.ISimulatedHuman.WorldPosition
Recupere e defina a posição do nó com relação ao mundo, em metros. A posição corresponde a um ponto no centro dos pés do humano.
Microsoft.PerceptionSimulation.ISimulatedHuman.Direction
Recupere e defina a direção dos rostos humanos simulados no mundo. 0 radianos enfrenta o eixo Z negativo. Radianos positivos giram no sentido horário sobre o eixo Y.
Microsoft.PerceptionSimulation.ISimulatedHuman.Height
Recupere e defina a altura do humano simulado, em metros.
Microsoft.PerceptionSimulation.ISimulatedHuman.LeftHand
Recupere a mão esquerda do humano simulado.
Microsoft.PerceptionSimulation.ISimulatedHuman.RightHand
Recupere a mão direita do humano simulado.
Microsoft.PerceptionSimulation.ISimulatedHuman.Head
Recupere a cabeça do humano simulado.
Microsoft.PerceptionSimulation.ISimulatedHuman.Move(Microsoft.PerceptionSimulation.Vector3)
Mova o humano simulado em relação à sua posição atual, em metros.
Parâmetros
- tradução – a tradução a ser movida, em relação à posição atual.
Microsoft.PerceptionSimulation.ISimulatedHuman.Rotate(System.Single)
Girar o humano simulado em relação à sua direção atual, no sentido horário sobre o eixo Y
Parâmetros
- radianos – a quantidade a ser girada ao redor do eixo Y.
Microsoft.PerceptionSimulation.ISimulatedHuman2
Propriedades adicionais estão disponíveis por meio da conversão do ISimulatedHuman para ISimulatedHuman2
public interface ISimulatedHuman2
{
/* New members in addition to those available on ISimulatedHuman */
ISimulatedSixDofController LeftController { get; }
ISimulatedSixDofController RightController { get; }
}
Microsoft.PerceptionSimulation.ISimulatedHuman2.LeftController
Recupere o controlador 6-DOF esquerdo.
Microsoft.PerceptionSimulation.ISimulatedHuman2.RightController
Recupere o controlador 6-DOF correto.
Microsoft.PerceptionSimulation.ISimulatedHand
Interface que descreve uma mão do humano simulado
public interface ISimulatedHand
{
Vector3 WorldPosition { get; }
Vector3 Position { get; set; }
bool Activated { [return: MarshalAs(UnmanagedType.Bool)] get; [param: MarshalAs(UnmanagedType.Bool)] set; }
bool Visible { [return: MarshalAs(UnmanagedType.Bool)] get; }
void EnsureVisible();
void Move(Vector3 translation);
void PerformGesture(SimulatedGesture gesture);
}
Microsoft.PerceptionSimulation.ISimulatedHand.WorldPosition
Recupere a posição do nó com relação ao mundo, em metros.
Microsoft.PerceptionSimulation.ISimulatedHand.Position
Recupere e defina a posição da mão simulada em relação ao humano, em metros.
Microsoft.PerceptionSimulation.ISimulatedHand.Activated
Recupere e defina se a mão está ativada no momento.
Microsoft.PerceptionSimulation.ISimulatedHand.Visible
Recupere se a mão está visível no momento para SimulatedDevice (ou seja, se ela está em uma posição a ser detectada pelo HandTracker).
Microsoft.PerceptionSimulation.ISimulatedHand.EnsureVisible
Mova a mão de modo que ela esteja visível para SimulatedDevice.
Microsoft.PerceptionSimulation.ISimulatedHand.Move(Microsoft.PerceptionSimulation.Vector3)
Mova a posição da mão simulada em relação à sua posição atual, em metros.
Parâmetros
- tradução – o valor para traduzir a mão simulada.
Microsoft.PerceptionSimulation.ISimulatedHand.PerformGesture(Microsoft.PerceptionSimulation.SimulatedGesture)
Execute um gesto usando a mão simulada. Ele só será detectado pelo sistema se a mão estiver habilitada.
Parâmetros
- gesto – o gesto a ser executado.
Microsoft.PerceptionSimulation.ISimulatedHand2
Propriedades adicionais estão disponíveis convertendo um ISimulatedHand em ISimulatedHand2.
public interface ISimulatedHand2
{
/* New members in addition to those available on ISimulatedHand */
Rotation3 Orientation { get; set; }
}
Microsoft.PerceptionSimulation.ISimulatedHand2.Orientation
Recupere ou defina a rotação da mão simulada. Radianos positivos giram no sentido horário ao olhar ao longo do eixo.
Microsoft.PerceptionSimulation.ISimulatedHand3
Propriedades adicionais estão disponíveis convertendo um ISimulatedHand em ISimulatedHand3
public interface ISimulatedHand3
{
/* New members in addition to those available on ISimulatedHand and ISimulatedHand2 */
GetJointConfiguration(SimulatedHandJoint joint, out SimulatedHandJointConfiguration jointConfiguration);
SetJointConfiguration(SimulatedHandJoint joint, SimulatedHandJointConfiguration jointConfiguration);
SetHandPose(SimulatedHandPose pose, bool animate);
}
Microsoft.PerceptionSimulation.ISimulatedHand3.GetJointConfiguration
Obtenha a configuração conjunta para a articulação especificada.
Microsoft.PerceptionSimulation.ISimulatedHand3.SetJointConfiguration
Defina a configuração conjunta para a articulação especificada.
Microsoft.PerceptionSimulation.ISimulatedHand3.SetHandPose
Defina a mão como uma pose conhecida com um sinalizador opcional para animar. Observação: animar não resultará em articulações refletindo imediatamente suas configurações de junção finais.
Microsoft.PerceptionSimulation.ISimulatedHead
Interface que descreve a cabeça do humano simulado.
public interface ISimulatedHead
{
Vector3 WorldPosition { get; }
Rotation3 Rotation { get; set; }
float Diameter { get; set; }
void Rotate(Rotation3 rotation);
}
Microsoft.PerceptionSimulation.ISimulatedHead.WorldPosition
Recupere a posição do nó com relação ao mundo, em metros.
Microsoft.PerceptionSimulation.ISimulatedHead.Rotation
Recupere a rotação da cabeça simulada. Radianos positivos giram no sentido horário ao olhar ao longo do eixo.
Microsoft.PerceptionSimulation.ISimulatedHead.Diameter
Recupere o diâmetro da cabeça simulada. Esse valor é usado para determinar o centro da cabeça (ponto de rotação).
Microsoft.PerceptionSimulation.ISimulatedHead.Rotate(Microsoft.PerceptionSimulation.Rotation3)
Gire a cabeça simulada em relação à rotação atual. Radianos positivos giram no sentido horário ao olhar ao longo do eixo.
Parâmetros
- rotação – o valor a ser girado.
Microsoft.PerceptionSimulation.ISimulatedHead2
Propriedades adicionais estão disponíveis convertendo um ISimulatedHead em ISimulatedHead2
public interface ISimulatedHead2
{
/* New members in addition to those available on ISimulatedHead */
ISimulatedEyes Eyes { get; }
}
Microsoft.PerceptionSimulation.ISimulatedHead2.Eyes
Recupere os olhos do humano simulado.
Microsoft.PerceptionSimulation.ISimulatedSixDofController
Interface que descreve um controlador de 6 DOF associado ao humano simulado.
public interface ISimulatedSixDofController
{
Vector3 WorldPosition { get; }
SimulatedSixDofControllerStatus Status { get; set; }
Vector3 Position { get; }
Rotation3 Orientation { get; set; }
void Move(Vector3 translation);
void PressButton(SimulatedSixDofControllerButton button);
void ReleaseButton(SimulatedSixDofControllerButton button);
void GetTouchpadPosition(out float x, out float y);
void SetTouchpadPosition(float x, float y);
}
Microsoft.PerceptionSimulation.ISimulatedSixDofController.WorldPosition
Recupere a posição do nó com relação ao mundo, em metros.
Microsoft.PerceptionSimulation.ISimulatedSixDofController.Status
Recupere ou defina o estado atual do controlador. O controlador status deve ser definido como um valor diferente de Desativado antes que qualquer chamada para mover, girar ou pressionar botões seja bem-sucedida.
Microsoft.PerceptionSimulation.ISimulatedSixDofController.Position
Recupere ou defina a posição do controlador simulado em relação ao humano, em metros.
Microsoft.PerceptionSimulation.ISimulatedSixDofController.Orientation
Recupere ou defina a orientação do controlador simulado.
Microsoft.PerceptionSimulation.ISimulatedSixDofController.Move(Microsoft.PerceptionSimulation.Vector3)
Mova a posição do controlador simulado em relação à sua posição atual, em metros.
Parâmetros
- translation – o valor para traduzir o controlador simulado.
Microsoft.PerceptionSimulation.ISimulatedSixDofController.PressButton(SimulatedSixDofControllerButton)
Pressione um botão no controlador simulado. Ele só será detectado pelo sistema se o controlador estiver habilitado.
Parâmetros
- button – o botão a ser pressionado.
Microsoft.PerceptionSimulation.ISimulatedSixDofController.ReleaseButton(SimulatedSixDofControllerButton)
Solte um botão no controlador simulado. Ele só será detectado pelo sistema se o controlador estiver habilitado.
Parâmetros
- button – o botão a ser liberado.
Microsoft.PerceptionSimulation.ISimulatedSixDofController.GetTouchpadPosition(out float, out float)
Obtenha a posição de um dedo simulado no touchpad do controlador simulado.
Parâmetros
- x – a posição horizontal do dedo.
- y - A posição vertical do dedo.
Microsoft.PerceptionSimulation.ISimulatedSixDofController.SetTouchpadPosition(float, float)
Defina a posição de um dedo simulado no touchpad do controlador simulado.
Parâmetros
- x – a posição horizontal do dedo.
- y - A posição vertical do dedo.
Microsoft.PerceptionSimulation.ISimulatedSixDofController2
Propriedades e métodos adicionais estão disponíveis convertendo um ISimulatedSixDofController em ISimulatedSixDofController2
public interface ISimulatedSixDofController2
{
/* New members in addition to those available on ISimulatedSixDofController */
void GetThumbstickPosition(out float x, out float y);
void SetThumbstickPosition(float x, float y);
float BatteryLevel { get; set; }
}
Microsoft.PerceptionSimulation.ISimulatedSixDofController2.GetThumbstickPosition(out float, out float)
Obtenha a posição do thumbstick simulado no controlador simulado.
Parâmetros
- x – a posição horizontal do botão.
- y - A posição vertical do botão.
Microsoft.PerceptionSimulation.ISimulatedSixDofController2.SetThumbstickPosition(float, float)
Defina a posição do thumbstick simulado no controlador simulado.
Parâmetros
- x – a posição horizontal do botão.
- y - A posição vertical do botão.
Microsoft.PerceptionSimulation.ISimulatedSixDofController2.BatteryLevel
Recupere ou defina o nível de bateria do controlador simulado. O valor deve ser maior que 0,0 e menor ou igual a 100,0.
Microsoft.PerceptionSimulation.ISimulatedEyes
Interface que descreve os olhos do humano simulado.
public interface ISimulatedEyes
{
Rotation3 Rotation { get; set; }
void Rotate(Rotation3 rotation);
SimulatedEyesCalibrationState CalibrationState { get; set; }
Vector3 WorldPosition { get; }
}
Microsoft.PerceptionSimulation.ISimulatedEyes.Rotation
Recupere a rotação dos olhos simulados. Radianos positivos giram no sentido horário ao olhar ao longo do eixo.
Microsoft.PerceptionSimulation.ISimulatedEyes.Rotate(Microsoft.PerceptionSimulation.Rotation3)
Gire os olhos simulados em relação à rotação atual. Radianos positivos giram no sentido horário ao olhar ao longo do eixo.
Parâmetros
- rotação – o valor a ser girado.
Microsoft.PerceptionSimulation.ISimulatedEyes.CalibrationState
Recupera ou define o estado de calibragem dos olhos simulados.
Microsoft.PerceptionSimulation.ISimulatedEyes.WorldPosition
Recupere a posição do nó com relação ao mundo, em metros.
Microsoft.PerceptionSimulation.ISimulationRecording
Interface para interagir com uma única gravação carregada para reprodução.
public interface ISimulationRecording
{
StreamDataTypes DataTypes { get; }
PlaybackState State { get; }
void Play();
void Pause();
void Seek(UInt64 ticks);
void Stop();
};
Microsoft.PerceptionSimulation.ISimulationRecording.DataTypes
Recupera a lista de tipos de dados na gravação.
Microsoft.PerceptionSimulation.ISimulationRecording.State
Recupera o estado atual da gravação.
Microsoft.PerceptionSimulation.ISimulationRecording.Play
Inicie a reprodução. Se a gravação estiver em pausa, a reprodução será retomada do local em pausa; se interrompida, a reprodução começará no início. Se já estiver jogando, essa chamada será ignorada.
Microsoft.PerceptionSimulation.ISimulationRecording.Pause
Pausa a reprodução em seu local atual. Se a gravação for interrompida, a chamada será ignorada.
Microsoft.PerceptionSimulation.ISimulationRecording.Seek(System.UInt64)
Busca a gravação para a hora especificada (em intervalos de 100 nanossegundos desde o início) e pausa nesse local. Se a hora estiver além do final da gravação, ela será pausada no último quadro.
Parâmetros
- tiques - O tempo para o qual procurar.
Microsoft.PerceptionSimulation.ISimulationRecording.Stop
Interrompe a reprodução e redefine a posição para o início.
Microsoft.PerceptionSimulation.ISimulationRecordingCallback
Interface para receber alterações de estado durante a reprodução.
public interface ISimulationRecordingCallback
{
void PlaybackStateChanged(PlaybackState newState);
};
Microsoft.PerceptionSimulation.ISimulationRecordingCallback.PlaybackStateChanged(Microsoft.PerceptionSimulation.PlaybackState)
Chamado quando o estado de reprodução de um ISimulationRecording foi alterado.
Parâmetros
- newState - O novo estado da gravação.
Microsoft.PerceptionSimulation.PerceptionSimulationManager
Objeto raiz para criar objetos Perception Simulation.
public static class PerceptionSimulationManager
{
public static IPerceptionSimulationManager CreatePerceptionSimulationManager(ISimulationStreamSink sink);
public static ISimulationStreamSink CreatePerceptionSimulationRecording(string path);
public static ISimulationRecording LoadPerceptionSimulationRecording(string path, ISimulationStreamSinkFactory factory);
public static ISimulationRecording LoadPerceptionSimulationRecording(string path, ISimulationStreamSinkFactory factory, ISimulationRecordingCallback callback);
Microsoft.PerceptionSimulation.PerceptionSimulationManager.CreatePerceptionSimulationManager(Microsoft.PerceptionSimulation.ISimulationStreamSink)
Crie no objeto para gerar pacotes simulados e entregá-los ao coletor fornecido.
Parâmetros
- sink – o coletor que receberá todos os pacotes gerados.
Retornar valor
O Gerenciador criado.
Microsoft.PerceptionSimulation.PerceptionSimulationManager.CreatePerceptionSimulationRecording(System.String)
Crie um coletor, que armazena todos os pacotes recebidos em um arquivo no caminho especificado.
Parâmetros
- path – o caminho do arquivo a ser criado.
Retornar valor
O coletor criado.
Microsoft.PerceptionSimulation.PerceptionSimulationManager.LoadPerceptionSimulationRecording(System.String,Microsoft.PerceptionSimulation.ISimulationStreamSinkFactory)
Carregue uma gravação do arquivo especificado.
Parâmetros
- path – o caminho do arquivo a ser carregado.
- factory – uma fábrica usada pela gravação para criar um ISimulationStreamSink quando necessário.
Retornar valor
A gravação carregada.
Microsoft.PerceptionSimulation.PerceptionSimulationManager.LoadPerceptionSimulationRecording(System.String,Microsoft.PerceptionSimulation.ISimulationStreamSinkFactory,Microsoft.PerceptionSimulation.ISimulationRecordingCallback)
Carregue uma gravação do arquivo especificado.
Parâmetros
- path – o caminho do arquivo a ser carregado.
- factory – uma fábrica usada pela gravação para criar um ISimulationStreamSink quando necessário.
- retorno de chamada – um retorno de chamada, que recebe atualizações regravando o status da gravação.
Retornar valor
A gravação carregada.
Microsoft.PerceptionSimulation.StreamDataTypes
Descreve os diferentes tipos de dados de fluxo.
public enum StreamDataTypes
{
None = 0x00,
Head = 0x01,
Hands = 0x02,
SpatialMapping = 0x08,
Calibration = 0x10,
Environment = 0x20,
SixDofControllers = 0x40,
Eyes = 0x80,
DisplayConfiguration = 0x100
All = None | Head | Hands | SpatialMapping | Calibration | Environment | SixDofControllers | Eyes | DisplayConfiguration
}
Microsoft.PerceptionSimulation.StreamDataTypes.None
Um valor sentinela usado para indicar nenhum tipo de dados de fluxo.
Microsoft.PerceptionSimulation.StreamDataTypes.Head
Fluxo de dados para a posição e a orientação da cabeça.
Microsoft.PerceptionSimulation.StreamDataTypes.Hands
Fluxo de dados para a posição e gestos das mãos.
Microsoft.PerceptionSimulation.StreamDataTypes.SpatialMapping
Fluxo de dados para mapeamento espacial do ambiente.
Microsoft.PerceptionSimulation.StreamDataTypes.Calibration
Fluxo de dados para calibragem do dispositivo. Os pacotes de calibragem só são aceitos por um sistema no Modo Remoto.
Microsoft.PerceptionSimulation.StreamDataTypes.Environment
Fluxo de dados para o ambiente do dispositivo.
Microsoft.PerceptionSimulation.StreamDataTypes.SixDofControllers
Fluxo de dados para controladores de movimento.
Microsoft.PerceptionSimulation.StreamDataTypes.Eyes
Fluxo de dados com os olhos do humano simulado.
Microsoft.PerceptionSimulation.StreamDataTypes.DisplayConfiguration
Fluxo de dados com a configuração de exibição do dispositivo.
Microsoft.PerceptionSimulation.StreamDataTypes.All
Um valor sentinela usado para indicar todos os tipos de dados registrados.
Microsoft.PerceptionSimulation.ISimulationStreamSink
Um objeto que recebe pacotes de dados de um fluxo de simulação.
public interface ISimulationStreamSink
{
void OnPacketReceived(uint length, byte[] packet);
}
Microsoft.PerceptionSimulation.ISimulationStreamSink.OnPacketReceived(uint length, byte[] packet)
Recebe um único pacote, que é digitado internamente e com versão.
Parâmetros
- length – o comprimento do pacote.
- packet – os dados do pacote.
Microsoft.PerceptionSimulation.ISimulationStreamSinkFactory
Um objeto que cria ISimulationStreamSink.
public interface ISimulationStreamSinkFactory
{
ISimulationStreamSink CreateSimulationStreamSink();
}
Microsoft.PerceptionSimulation.ISimulationStreamSinkFactory.CreateSimulationStreamSink()
Cria uma única instância de ISimulationStreamSink.
Retornar valor
O coletor criado.