Режим подвижного пола на полу с незначительным динамическим движением
Начиная с Windows Holographic версии 21H2, HoloLens 2 поддерживает платформы с низким динамическим движением. При использовании поддерживаемой версии ОС и включения режима движущейся платформы вы сможете использовать HoloLens 2 в ранее недоступных средах, таких как большие корабли и крупные морские суда. Сейчас эта функция предназначена для использования только в таких условиях. Хотя ничто не мешает вам попытаться воспользоваться ею в других средах, эта функция ориентирована в первую очередь на поддержку именно таких сред.
В этой статье рассматриваются следующие вопросы:
Зачем нужна поддержка подвижного пола
HoloLens нужно отслеживать положение вашей головы с 6 степенями свободы (движение по осям X, Y, Z, тангаж, крен, рыскание), чтобы отображать стабильные голограммы. Для этого HoloLens получает два похожих набора данных из таких отдельных источников:
- Камеры видимого света. Эти камеры отслеживают среду, например комнату, в которой вы используете HoloLens.
- Инерциальный измерительный блок (IMU). IMU состоит из акселерометра, гироскопа и магнитометра, который отслеживает движение головы и ориентацию относительно инерционного кадра. Мы можем предположить, что движение Земли не имеет большого значения для отслеживания гарнитуры, и поэтому мы можем упростить рассмотрение движения относительно Земли.
Сведения из этих двух источников объединяются для отслеживания положения головы с низкой задержкой и достаточной частотой, обеспечивающей отображение четких голограмм.
Но такой подход основывается на ключевом предположении, что среда (отслеживаемая камерами) сохраняет неподвижность относительно Земли (относительно положения которой IMU выполняет измерения). Если это не так, например на морском судне, данные из двух источников могут конфликтовать и приводить к сбою отслеживания. При таком конфликте также передаются неправильные данные о положении, из-за чего голограммы становятся расплывчатыми и даже теряется отслеживание.
Режим подвижного пола устраняет эту проблему. При включении режима движущейся платформы средство отслеживания не может полагаться на наши входные данные датчика, чтобы всегда полностью согласиться друг с другом. Вместо этого HoloLens необходимо поддерживать оценку движения платформы, чтобы позволить ей соответствующим образом преобразовывать измерения IMU или фильтровать их, если движение платформы является неопределенным.
Поддерживаемые среды и известные ограничения
Хотя режим подвижного пола был разработан для интеллектуальной обработки случаев с конфликтами инерциальных и визуальных данных, сейчас он предназначен для использования на крупных морских судах с незначительным динамическим движением. Это предполагает наличие определенных ограничений и неподдерживаемых сценариев.
Известные ограничения
- Единственные поддерживаемые среды для режима подвижного пола (MPM) — крупные морские суда с незначительным динамическим движением. Это означает, что большинство обычных сред и ситуаций еще не поддерживаются из-за высокой частоты движения, сильного ускорения и рывков. Например, не поддерживается использование этой функции в самолетах, поездах, автомобилях, автобусах, лифтах, на небольших лодках, велосипедах и т. д.
- При включенном режиме MPM голограммы могут немного дрожать, особенно в условиях волнения на воде.
- Ничто не мешает пользователям попытаться применить MPM в неподдерживаемых средах, но при этом могут возникнуть нежелательные побочные эффекты, даже если устройство сможет отслеживать положение в неподдерживаемом пространстве. Например, с MPM пользователи смогут использовать устройство в движущемся лифте, хотя раньше это было невозможно. К сожалению, хотя MPM позволяет устройству сохранять данные отслеживания, эта функция пока не может управлять картами. При движении между этажами в лифте устройство будет путать верхние и нижние этажи, что негативно влияет на качество карт.
Предварительные условия
Поддержка режима подвижного пола имеет следующие требования:
Установите Windows Holographic версии 21H2 или более поздней, установив последнюю сборку (с обновлением или перезаписью) через ARC.
Примечание
Хотя режим подвижного пола был представлен в версии 21H2, рекомендуется использовать последнюю сборку, чтобы получить доступ ко всем функциям и обновлениям.
Включение режима подвижного пола
Как активировать режим подвижного пола?
Включить режим подвижного пола можно четырьмя способами:
- с помощью приложения параметров на устройстве;
- с помощью политик управления мобильными устройствами(MDM);
- Через API API api выпускается с помощью средства Смешанная реальность Feature в Unity и через Nuget.org
- с помощью портала устройства.
Для поддержки разных вариантов использования вам предоставляются разные методы для активации режима подвижного пола. Важно, чтобы вы тщательно выбрали нужный метод. Ключевым вопросом будет следующий: "Кто знает, используется ли в настоящий момент HoloLens 2 на подвижном полу?". См. пример в следующей таблице:
| Кто знает, используется ли HL2 на подвижном полу | Лучший способ настройки режима подвижного пола | Преимущества | Затраты |
|---|---|---|---|
| Системный администратор | Управление мобильными устройствами (MDM) | Пользователю не нужно выполнять действия. Все приложения будут работать без внесения изменений. Устройство может быть защищено от перехода в неверный режим. | Пользователь и приложения не могут изменить режим. |
| Конечный пользователь | Приложение "Параметры" | Пользователь часто лучше всего знает, когда и где используется устройство. Все приложения будут работать без внесения изменений. | Возможно, пользователь не знает о доступности режима. |
| Приложение | Использование пакета SDK | Если условия среды не известны заранее, для смены режима можно использовать подсказки для конкретных вариантов использования. Отменяет требование того, что пользователю необходимо принять это решение и изменить режим в параметрах. | Плохо спроектированное приложение может привести к плохому взаимодействию и оставить устройство в непредвиденном режиме. |
В параметрах устройства
- Требует наличия сборки версии 20348.1447 или более поздней.
Открытие меню "Пуск"
Откройте приложение "Параметры".
Выберите Система.
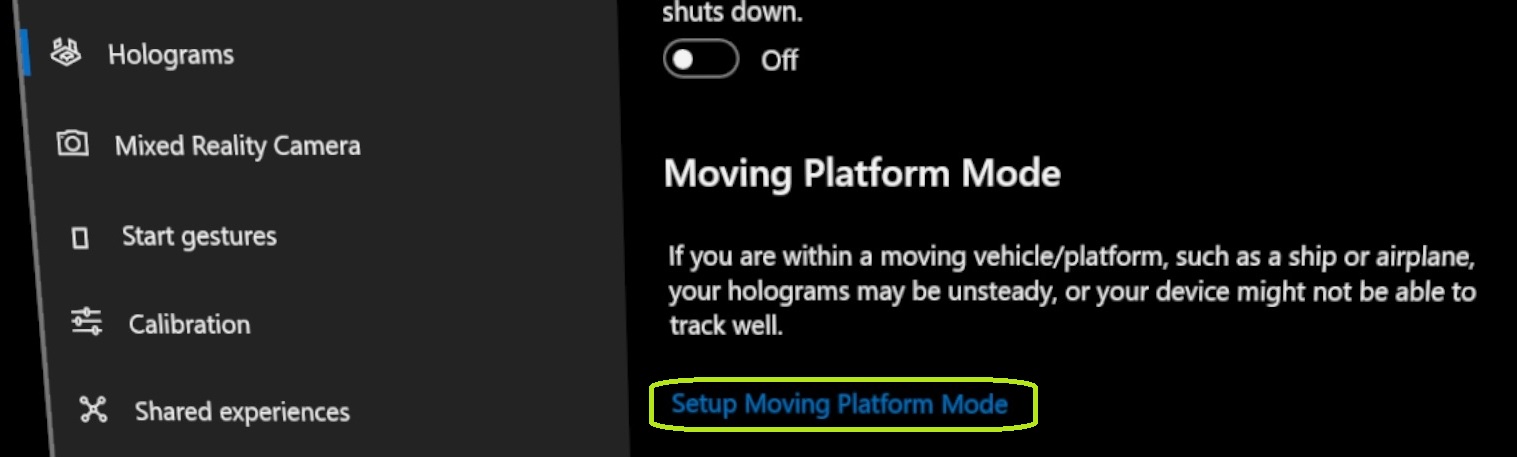
Откройте Голограммы
В разделе "Режим подвижного пола" выберите Настроить режим подвижного пола.
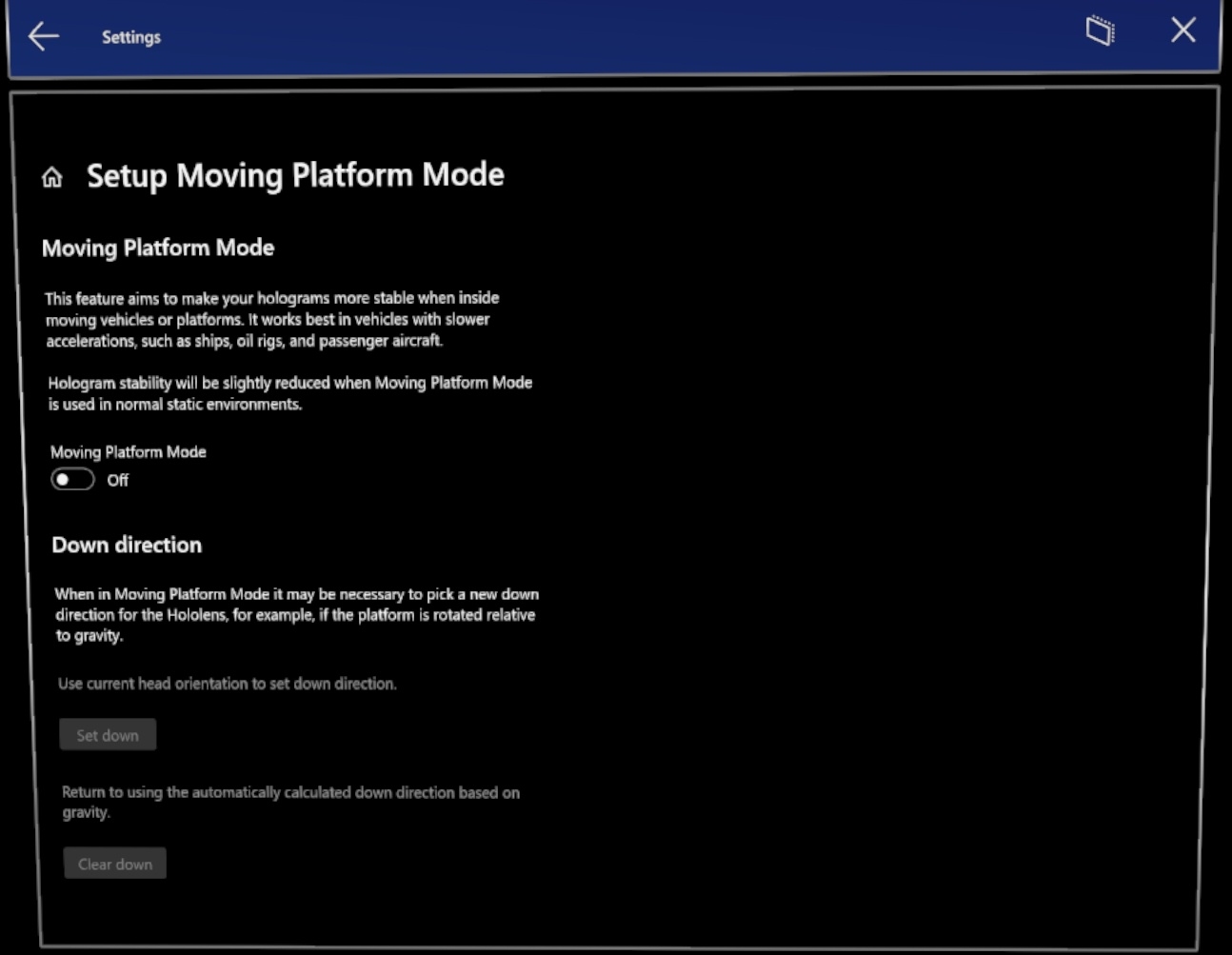
Выберите параметр Вкл. для режима подвижного пола.
С помощью управления мобильными устройствами (MDM)
- Требует наличия сборки версии 20348.1447 или более поздней.
MDM — это средство для системных администраторов, позволяющее задавать определенные параметры на устройствах организации. Дополнительные сведения см. в статье Использование Microsoft Endpoint Manager Intune для управления устройствами HoloLens. Системные администраторы могут выбрать один из трех вариантов:
- Принудительно включить режим подвижного пола на устройстве.
- Принудительно отключить режим подвижного пола на устройстве.
- Разрешить пользователям выбирать эту настройку с помощью приложения "Параметры" или на портале устройства.
MixedReality/ConfigureMovingPlatform
Эта политика управляет поведением функции подвижного пола в HoloLens 2 (а именно, ее включением, отключением или возможностью настройки пользователем). Она должна использоваться только теми клиентами, которые планируют использовать HoloLens 2 в средах с незначительным динамическим движением. Дополнительные сведения см. в статье Режим подвижного пола в HoloLens 2.
OMA-URI новой политики: ./Device/Vendor/MSFT/Policy/Config/MixedReality/ConfigureMovingPlatform
Поддерживаемые значения:
0(по умолчанию) — значение задается пользователем. Первоначальное состояние — OFF (Выкл.), после изменения которого настройка пользователя сохраняется даже после перезагрузки, а также используется при инициализации системы.1Принудительное отключение . Перемещение платформы отключено и не может быть изменено пользователем.2Принудительное включение : движущаяся платформа включена и не может быть изменена пользователем.
MixedReality/ManualDownDirectionDisabled
Эта политика определяет, может ли пользователь изменять вручную направление низа. Если направление низа не задано пользователем, система будет использовать рассчитанное автоматически направление низа. Эта политика не имеет зависимостей от политики ConfigureMovingPlatform, и их можно задать независимо друг от друга.
OMA-URI новой политики: ./Device/Vendor/MSFT/Policy/Config/MixedReality/ManualDownDirectionDisabled
Поддерживаемые значения:
False(по умолчанию) — при необходимости пользователь может вручную изменить направление низа. В противном случае направление низа определяется автоматически на основе измеренного вектора гравитации.True— пользователь не может вручную изменить направление низа, оно всегда определяется автоматически на основе измеренного вектора гравитации.
Включение с помощью пакета SDK
- Требует наличия сборки версии 20348.1447 или более поздней.
Иногда решение касательно использования режима подвижного пола нужно принимать в зависимости от ситуации — возможно, он требуется вам только при использовании приложения или только для определенного приложения. В таких случаях вы можете включить режим подвижного пола из приложения с помощью пакета SDK.
Включение с помощью режима разработчика и портала устройства
Чтобы включить режим подвижного пола таким образом, сначала включите портал устройства.
Выберите значок Система (гармошка) в меню слева.
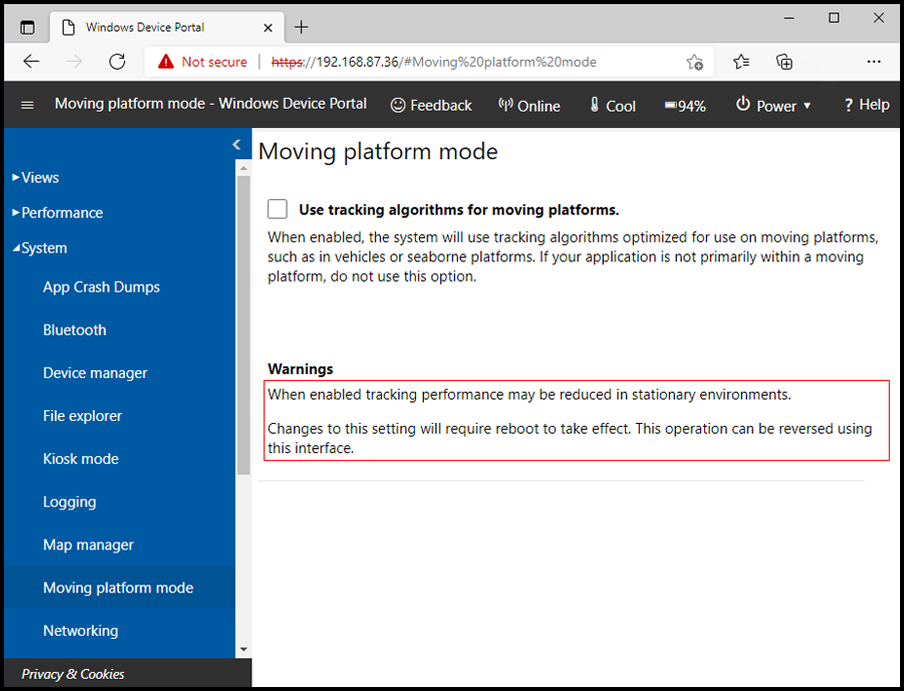
Выберите страницу Режим подвижного пола и установите соответствующий флажок.
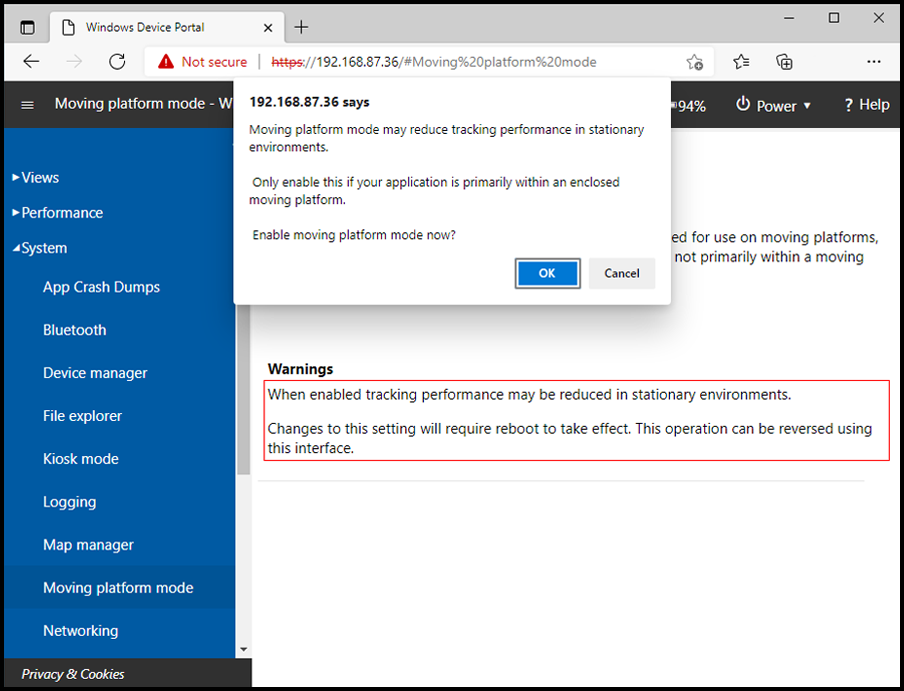
При появлении запроса с предупреждением нажмите ОК.
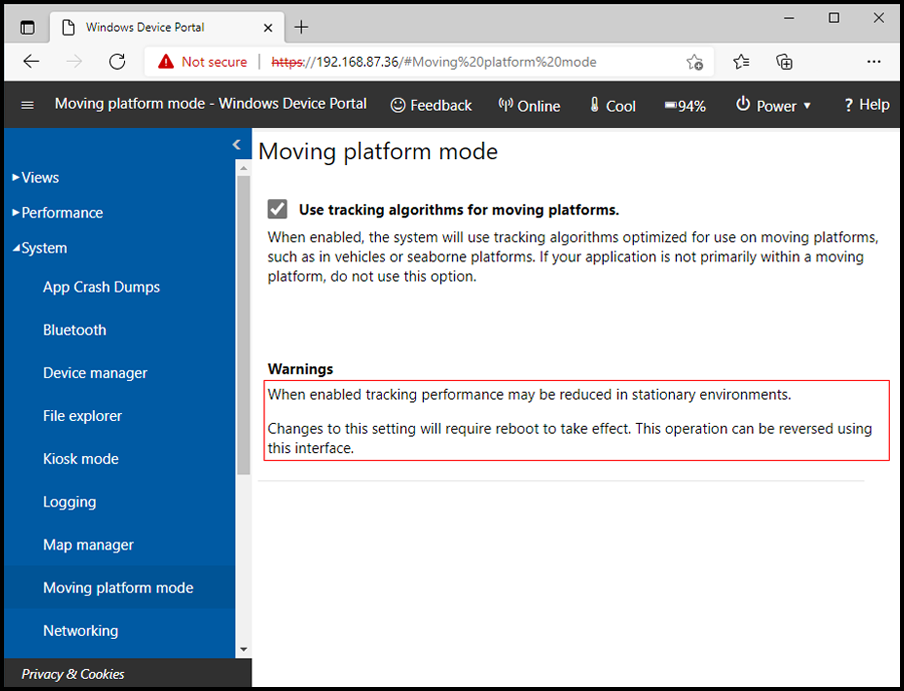
Режим изменится немедленно, перезагружать устройство не нужно.
Если вы не видите вариант "Режим подвижного пола" на портале устройства, скорее всего, вы используете неподходящую сборку. См. раздел Предварительные требования.
Когда следует включать или отключать режим подвижного пола
При использовании любого из этих методов отслеживание гарнитуры временно перестанет работать, а на дисплее будет отображаться надпись "looking for your space" (поиск пространства). Поэтому не рекомендуется активно изменять режим в момент использования устройства.
Если ваш вариант использования предусматривает переход между стационарными средами и средами с движением, рекомендуется оставить устройство в режиме подвижного пола. В таких случаях качество отслеживания в стационарных средах будет немного снижено. Но для большинства пользователей этого будет достаточно по сравнению с утратой отслеживания из-за частой смены режима подвижного пола или из-за того, что пользователь забыл активировать этот режим.
Направление низа
Как правило, система считает направлением "низа" такое, в котором действует сила гравитации. Оно используется для выравнивания некоторых пользовательских интерфейсов. Но на подвижном полу "низ" и направление гравитации не всегда совпадают. Режим подвижного пола предоставляет два решения этой проблемы:
Автоматический расчет низа
Вычисляет направление низа на основе среднего значения измеренных направлений гравитации. Например, при тангаже судна в море фактический вектор гравитации будет вращаться относительно корпуса корабля. Среднее значение векторов гравитации за короткое время указывает на пол каюты корабля, так как колебания вектора гравитации уравновесят друг друга.
Автоматическое вычисление по умолчанию используется, если в режиме подвижной платформы вам не нужно ничего делать, чтобы он работал правильно. Он переопределяется, если задано направление вниз вручную. Конкретное направление вниз не будет сохранено на устройстве, но будет пересчитано при необходимости.
Настройка направления низа вручную
В случае использования, когда ориентация платформы не соответствует гравитации, даже если она усреднена в течение короткого периода времени, можно задать направление вниз вручную. Чтобы задать направление низа вручную, сделайте следующее:
- Открытие меню "Пуск"
- Откройте приложение Параметры.
- Выберите Система.
- Выберите Голограммы.
- В разделе "Режим подвижного пола" выберите Настроить режим подвижного пола.
- Выровняйте голову с полом, чтобы вы смотрели на горизонт
- Нажмите кнопку Задать низ.
После нажатия кнопки "Задать низ" текущая ориентация головы будет использоваться, чтобы задать направление низа. Если направление вниз задается вручную, оно постоянно сохраняется на устройстве и будет отзываться после перезагрузки или отслеживания потерь.
Чтобы удалить направление низа, сохраненное в системе, нажмите кнопку Очистить низ на странице Настройка режима подвижного пола. При этом выполняется очистка сохраненного направления и задается использование системой рассчитанного автоматически направления низа. Определенное направление, заданное вручную, не может быть восстановлено после этой операции. Необходимо снова задать его с помощью приведенного выше процесса.
Создание отчетов о проблемах
Вы можете столкнуться с проблемами, если это произойдет, сообщить о проблемах, чтобы их можно было исследовать и улучшить продукт:
- Сообщите о проблеме через Центр отзывов в категории Точность, стабильность и надежность голограмм и включите следующее:
- Описание проблемы, включая ожидаемое и демонстрируемое поведение.
- Видеозапись Смешанной реальности для описания проблемы.
- Откройте обращение в службу поддержки на сайте https://aka.ms/hlsupport и предоставьте URL-адрес Центра отзывов, чтобы мы могли обратиться к вам с возникающими вопросами.
Обратная связь
Ожидается в ближайшее время: в течение 2024 года мы постепенно откажемся от GitHub Issues как механизма обратной связи для контента и заменим его новой системой обратной связи. Дополнительные сведения см. в разделе https://aka.ms/ContentUserFeedback.
Отправить и просмотреть отзыв по