Maskinvaruspecifikationer för Azure Kinect DK
Den här artikeln beskriver hur Azure Kinect-maskinvaran integrerar Microsofts senaste sensorteknik i ett enda, USB-anslutet tillbehör.
Termer
Följande förkortningar används genomgående i artikeln.
- NFOV (djupläge med smalt synfält)
- WFOV (djupläge med brett synfält)
- FOV (synfält)
- FPS (bildrutor per sekund)
- IMU (tröghetsmätningsenhet)
- FoI (intressefält)
Produktmått och vikt
Azure Kinect-enheten har följande mått och vikt.
- Mått: 103 x 39 x 126 mm
- Vikt: 440 g
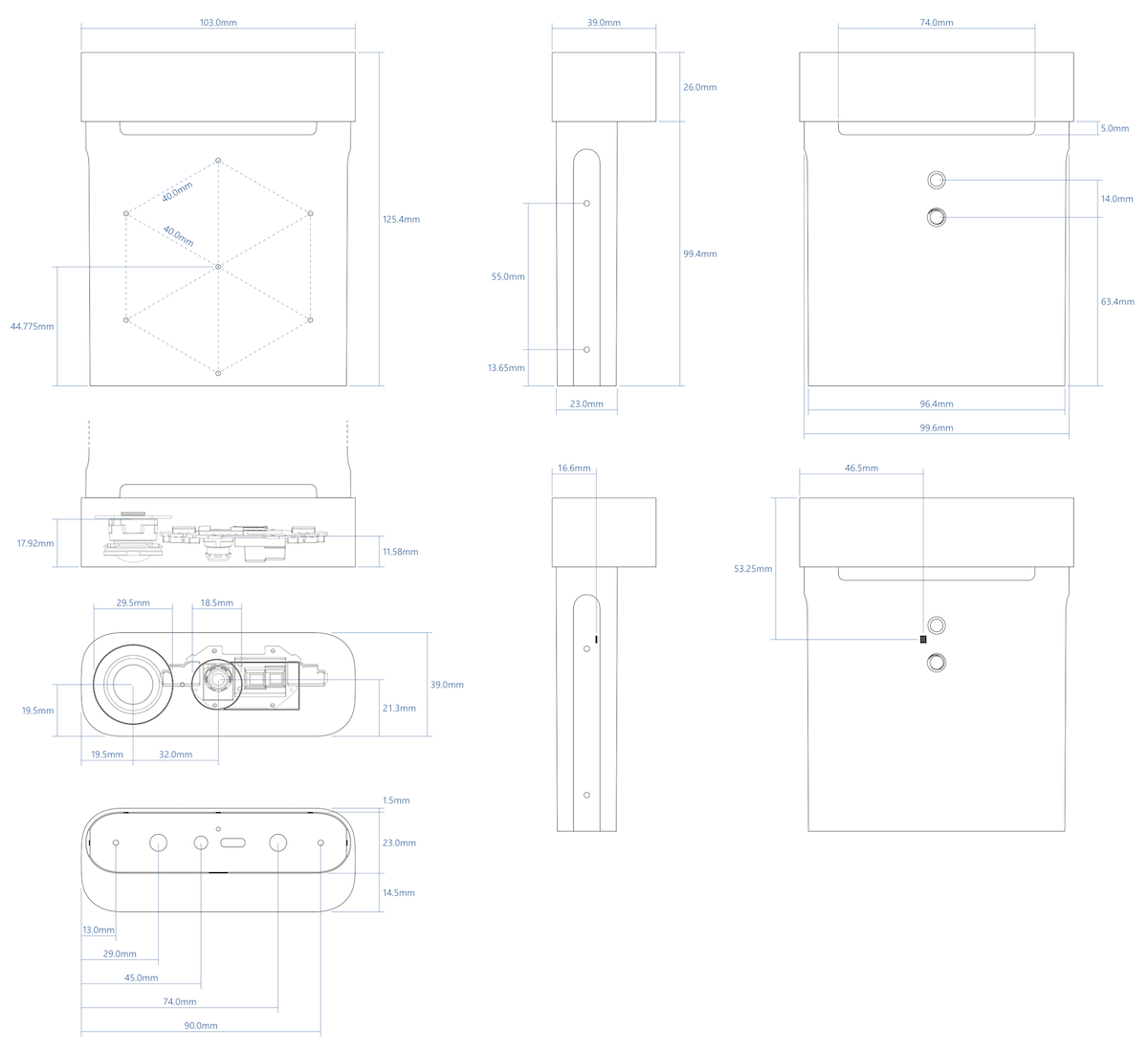
En STEP-fil för Azure Kinect-enheten finns här.
Driftmiljö
Azure Kinect DK är avsett för utvecklare och kommersiella företag som arbetar i följande omgivningsförhållanden:
- Temperatur: 10-250C
- Luftfuktighet: 8–90 % (icke-kondenserande) Relativ luftfuktighet
Anteckning
Användning utanför dessa omgivningsförhållanden kan göra att enheten slutar fungera eller inte fungerar som den ska. Dessa omgivningsförhållanden gäller omgivningen nära enheten vid all form av drift. Om enheten är innesluten i ett externt hölje rekommenderar vi aktiv temperaturkontroll och/eller andra kyllösningar så att enheten alltid körs inom angivna intervall. Enheten har en kylkanal mellan fram- och baksidan. Kontrollera att kylkanalen inte blockeras när du implementerar enheten.
Läs säkerhetsinformationen för produkten.
Driftlägen som stöds av djupkameran
Azure Kinect DK integrerar en Microsoft-designad 1-megapixel ToF-djupkamera (Time-of-Flight) med bildsensorn som presenterades vid ISSCC 2018. Djupkameran stöder de lägen som anges nedan:
| Läge | Lösning | FoI | FPS | Driftintervall* | Exponeringstid |
|---|---|---|---|---|---|
| NFOV (ej intervall) | 640 × 576 | 75 ° × 65 ° | 0, 5, 15, 30 | 0,5–3,86 m | 12,8 ms |
| NFOV 2 × 2 (intervall) (SW) | 320 × 288 | 75 ° × 65 ° | 0, 5, 15, 30 | 0,5–5,46 m | 12,8 ms |
| WFOV 2 × 2 (intervall) | 512 × 512 | 120 ° × 120 ° | 0, 5, 15, 30 | 0,25–2,88 m | 12,8 ms |
| WFOV (ej intervall) | 1 024 × 1 024 | 120 ° × 120 ° | 0, 5, 15 | 0,25–2,21 m | 20,3 ms |
| Passiv IR | 1 024 × 1 024 | Ej tillämpligt | 0, 5, 15, 30 | Ej tillämpligt | 1,6 ms |
*15% till 95% reflektivitet vid 850nm, 2,2 μW/cm2/nm, slumpmässigt fel std. dev. ≤ 17 mm, typiskt systematiskt fel < 11 mm + 0,1 % av avståndet utan interferens med flera banor. Djup får anges utanför det driftsintervall som anges ovan. Det beror på ett objekts reflektivitet.
Driftlägen som stöds av färgkameran
Azure Kinect DK har en OV12A10 12MP CMOS-sensor med rullande slutare. De inbyggda driftlägena anges nedan:
| RGB-kameraupplösning (HxV) | Bredd–höjd-förhållande | Formatalternativ | Bildfrekvens (FPS) | Nominellt FOV (HxV) (efterbearbetning) |
|---|---|---|---|---|
| 3 840 × 2 160 | 16:9 | MJPEG | 0, 5, 15, 30 | 90 ° × 59 ° |
| 2 560 × 1 440 | 16:9 | MJPEG | 0, 5, 15, 30 | 90 ° × 59 ° |
| 1 920 × 1 080 | 16:9 | MJPEG | 0, 5, 15, 30 | 90 ° × 59 ° |
| 1 280 × 720 | 16:9 | MJPEG/YUY2/NV12 | 0, 5, 15, 30 | 90 ° × 59 ° |
| 4 096 × 3 072 | 4:3 | MJPEG | 0, 5, 15 | 90 ° × 74,3 ° |
| 2 048 × 1 536 | 4:3 | MJPEG | 0, 5, 15, 30 | 90 ° × 74,3 ° |
RGB-kameran är USB-videoklasskompatibel och kan användas utan Sensor SDK. RGB-kamerans färgområde: BT.601 full range [0...255]. Undersampling av MJPEG-krom är 4:2:2.
Anteckning
Sensor SDK stöder färgbilder i BGRA-pixelformat. Det här är inte ett inbyggt läge som stöds av enheten och kräver extra processorbelastning. Värdprocessorn används för konvertering från MJPEG-bilder som tas emot från enheten.
Värden för RGB-kamerans exponeringstider
Tabellen nedan innehåller acceptabla manuella exponeringsvärden för RGB-kameran:
| exp | 2^exp | 50 Hz | 60 Hz |
|---|---|---|---|
| -11 | 488 | 500 | 500 |
| −10 | 977 | 1250 | 1250 |
| -9 | 1953 | 2500 | 2500 |
| -8 | 3906 | 10000 | 8330 |
| -7 | 7813 | 20000 | 16670 |
| −6 | 15625 | 30000 | 33330 |
| -5 | 31250 | 40000 | 41670 |
| -4 | 62500 | 50000 | 50000 |
| -3 | 125000 | 60000 | 66670 |
| -2 | 250000 | 80000 | 83330 |
| -1 | 500000 | 100000 | 100000 |
| 0 | 1000000 | 120000 | 116670 |
| 1 | 2000000 | 130000 | 133330 |
Tidsinställning för rådata i djupsensorn
| Djupläge | IR Pulser |
Puls Bredd |
Inaktiv Perioder |
Inaktivitetstid | Exponering Tid |
|---|---|---|---|---|---|
| NFOV (ej intervall) NFOV 2xx (intervall) WFOV 2 × 2 (intervall) |
9 | 125 us | 8 | 1450 us | 12,8 ms |
| WFOV (ej intervall) | 9 | 125 us | 8 | 2390 us | 20,3 ms |
Kamerans synfält
Nästa bild visar djupkamerans och RGB-kamerans synfält, eller de vinklar som sensorerna ”ser”. Det här diagrammet visar RGB-kameran i 4:3-läge.

Den här bilden visar kamerans synfält framifrån från ett avstånd på 2 000 mm.
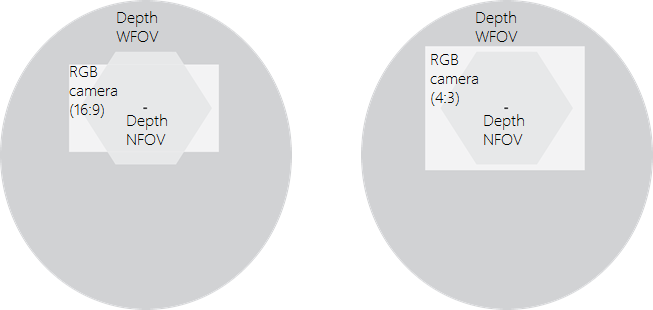
Anteckning
Med djup i NFOV-läge har RGB-kameran bättre pixelöverlappning med 4:3- än med 16:9-upplösning.
Rörelsesensor (IMU)
Den integrerade tröghetsmätningsenheten (IMU) är en LSM6DSMUS och har både accelerometer och gyroskop. Accelerometern och gyroskopet samplas samtidigt vid 1,6 kHz. Samplingarna rapporteras till värden vid 208 Hz.
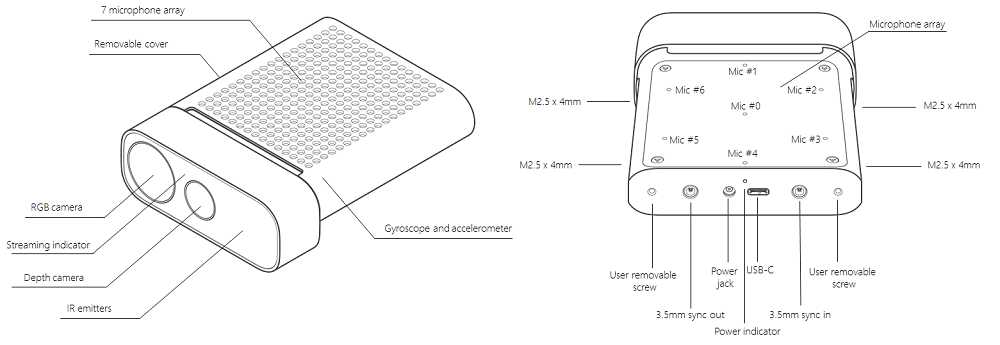
Mikrofonmatris
Azure Kinect DK integrerar en cirkulär matris med sju mikrofoner med hög kvalitet som visas som en USB-standardenhet för ljudklass 2.0. Alla 7 kanaler är tillgängliga. Prestandaspecifikationerna är som följer:
- Känslighet: -22 dBFS (94 dB SPL, 1 kHz)
- Signal till brus-förhållande > 65 dB
- Akustisk överbelastningspunkt: 116 dB

USB
Azure Kinect DK är en USB 3-kompositenhet som exponerar följande maskinvaruslutpunkter för operativsystemet:
Leverantörs-ID är 0x045E (Microsoft). Tabellen Produkt-ID visas nedan:
| USB-gränssnitt | PNP-IP | Kommentarer |
|---|---|---|
| USB3.1 Gen2 Hub | 0x097A | Huvudhubben |
| USB 2.0-hubb | 0x097B | HS USB |
| Djupkamera | 0x097C | USB 3.0 |
| Färgkamera | 0x097D | USB 3.0 |
| Mikrofoner | 0x097E | HS USB |
Indikatorer
Enheten har en indikator för kameraströmning på framsidan som kan inaktiveras via programmering med hjälp av Sensor SDK.
Statuslampan bakom enheten indikerar enhetens tillstånd:
| När lampan | Betyder det att |
|---|---|
| Lyser med fast vitt sken | Enheten är på och fungerar korrekt. |
| Blinkar med vitt sken | Enheten är på men har ingen USB 3.0-dataanslutning. |
| Blinkar med gult sken | Enheten har inte tillräckligt med ström. |
| Blinkar med växelvis gult och vitt sken | Uppdatering av den inbyggda programvaran eller en återställning pågår |
Strömförsörjningsenhet
Enheten kan strömförsörjas på två sätt:
- Med den medföljande strömkällan. Strömkontakten är en 4,5 mm OD med 3,0 mm ID och en stiftdiameter på 0,6 mm.
- Med en ”Type C till Type-C”-kabel för både ström och data.
En ”Type C till Type C”-kabel medföljer inte Azure Kinect DK.
Anteckning
- Den medföljande strömkabeln är en ”USB Type-A till enstiftskontakt”-anslutning. Använd den medföljande väggkontakten med den här kabeln. Enheten kan dra mer ström än vad två standard USB Type-A-portar kan ge.
- USB-kablarna är viktiga och vi rekommenderar att du använder kablar av hög kvalitet samt att du kontrollerar att de fungerar innan du fjärrdistribuerar enheten.
Tips
Så här väljer du en lämplig ”Type-C till Type-C”-kabel:
- Den USB-certifierade kabeln måste ha stöd för både ström och data.
- En passiv kabel bör vara mindre än 1,5 m lång. Om den är längre använder du en aktiv kabel.
- Kabeln måste ha stöd för minst 1.5A. Annars måste du ansluta till en extern strömkälla.
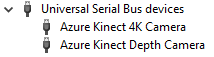
Verifiera kabeln:
Anslut enheten via kabeln till värddatorn.
Kontrollera att alla enheter räknas upp korrekt i Enhetshanteraren i Windows. Djup- och RGB-kameran bör visas som i exemplet nedan.
Kontrollera att kabeln kan strömmas på ett tillförlitligt sätt på alla sensorer i Azure Kinect Viewer med följande inställningar:
- Djupkamera: NFOV obindad
- RGB-kamera: 2160p
- Mikrofoner och IMU aktiverade
Vad betyder lampan?
Strömindikatorn är en LED-lampa på baksidan av Azure Kinect DK. Färgen på lampan ändras beroende på enhetens status.
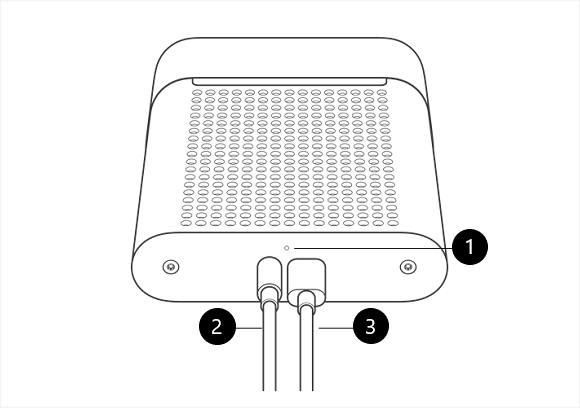
Följande komponenter har märkts ut i den här bilden:
- Strömindikator
- Strömkabel (ansluts till strömkällan)
- USB-C-datakabel (ansluts till datorn)
Kontrollera att kablarna är anslutna på samma sätt som i bilden. Titta sedan i följande tabell och se vad strömlampans olika lägen betyder.
| När lampan: | Betyder det att: | Och du bör: |
|---|---|---|
| Lyser med fast vitt sken | Enheten är på och fungerar som den ska. | Använd enheten. |
| Inte lyser | Enheten är inte ansluten till datorn. | Kontrollera att den runda strömkabeln är ansluten till enheten och till USB-strömadaptern. Kontrollera att USB-C-kabeln är ansluten till enheten och till datorn. |
| Blinkar med vitt sken | Enheten är på men har ingen USB 3.0-dataanslutning. | Kontrollera att den runda strömkabeln är ansluten till enheten och till USB-strömadaptern. Kontrollera att USB-C-kabeln är ansluten till enheten och till en USB 3.0-port på datorn. Anslut enheten till en annan USB 3.0-port på datorn. Öppna Enhetshanteraren (Start>Kontrollpanelen Enhetshanteraren>) på datorn och kontrollera att datorn har en USB 3.0-värdstyrenhet som stöds. |
| Blinkar med gult sken | Enheten har inte tillräckligt med ström. | Kontrollera att den runda strömkabeln är ansluten till enheten och till USB-strömadaptern. Kontrollera att USB-C-kabeln är ansluten till enheten och till datorn. |
| Lyser gult och blinkar sedan med vitt sken | Enheten är på och en uppdatering av den inbyggda programvaran tas emot, eller så återställs enhetens fabriksinställningarna. | Vänta tills strömindikatorn lyser med vitt fast sken. Mer information finns i Återställa Azure Kinect DK. |
Strömförbrukning
Azure Kinect DK förbrukar upp till 5,9 W. Den specifika strömförbrukningen är användningsberoende.
Kalibrering
Azure Kinect DK kalibreras på fabriken. Kalibreringsparametrarna för visuella sensorer och tröghetssensorer stöder programmatisk frågekörning via Sensor SDK.
Enhetsåterställning
Enhetens inbyggda programvara kan återställas till den ursprungliga inbyggda programvaran med knappen under låsstiftet.
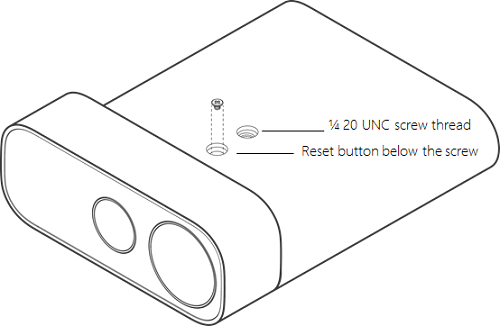
Information om hur du återställer enheten finns i instruktionerna här.