Fonction D3DXMatrixRotationYawPitchRoll (D3dx9math.h)
Notes
La bibliothèque d’utilitaireS D3DX est déconseillée. Nous vous recommandons d’utiliser DirectXMath à la place.
Génère une matrice avec un lacet, un tangage et un roulis spécifiés.
Syntaxe
D3DXMATRIX* D3DXMatrixRotationYawPitchRoll(
_Inout_ D3DXMATRIX *pOut,
_In_ FLOAT Yaw,
_In_ FLOAT Pitch,
_In_ FLOAT Roll
);
Paramètres
-
pOut [in, out]
-
Type : D3DXMATRIX*
Pointeur vers la structure D3DXMATRIX qui est le résultat de l’opération.
-
Lacet [in]
-
Type : FLOAT
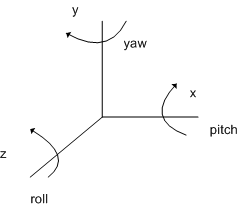
Lacet autour de l’axe y, en radians.
-
Pitch [in]
-
Type : FLOAT
Tanger autour de l’axe X, en radians.
-
Roll [in]
-
Type : FLOAT
Tournez autour de l’axe z, en radians.
Valeur retournée
Type : D3DXMATRIX*
Pointeur vers une structure D3DXMATRIX avec le lacet, le tangage et le roulis spécifiés.
Notes
La valeur de retour de cette fonction est la même valeur retournée dans le paramètre pOut . De cette façon, la fonction D3DXMatrixRotationYawPitchRoll peut être utilisée comme paramètre pour une autre fonction.
L’ordre des transformations est d’abord roll, puis pitch, puis yaw. Par rapport à l’axe de coordonnées local de l’objet, cela équivaut à une rotation autour de l’axe z, suivie d’une rotation autour de l’axe x, suivie d’une rotation autour de l’axe y, comme illustré dans l’illustration suivante.
Spécifications
| Condition requise | Valeur |
|---|---|
| En-tête |
|
| Bibliothèque |
|
Voir aussi
Commentaires
Bientôt disponible : Tout au long de 2024, nous allons supprimer progressivement GitHub Issues comme mécanisme de commentaires pour le contenu et le remplacer par un nouveau système de commentaires. Pour plus d’informations, consultez https://aka.ms/ContentUserFeedback.
Envoyer et afficher des commentaires pour