This article explains the structure of a control transfer and how a client driver should send a control request to the device.
About the default endpoint
All USB devices must support at least one endpoint called the default endpoint. Any transfer that targets the default endpoint is called a control transfer. The purpose of a control transfer is to enable the host to obtain device information, configure the device, or perform control operations that are unique to the device.
Let's begin by studying these characteristics of the default endpoint.
The address of the default endpoint is 0.
The default endpoint is bidirectional, that is, the host can send data to the endpoint and receive data from it within one transfer.
The default endpoint is available at the device level and is not defined in any interface of the device.
The default endpoint is active as soon as a connection is established between the host and the device. It is active even before a configuration is selected.
The maximum packet size of the default endpoint depends on the bus speed of the device. Low speed, 8 bytes; full and high speed, 64 bytes; SuperSpeed, 512 bytes.
Layout of a control transfer
Because control transfers are high priority transfers, certain amount of bandwidth is reserved on the bus by the host. For low and full speed devices, 10% of the bandwidth; 20% for high and SuperSpeed transfers devices. Now, let's look at the layout of a control transfer.
A control transfer is divided into three transactions: setup transaction, data transaction, and status transaction. Each transaction contains three types of packets: token packet, data packet, and handshake packet.
Certain fields are common to all packets. These fields are:
Sync field that indicates the start of packet.
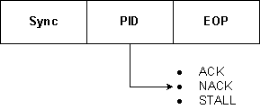
Packet identifier (PID) that indicates the type of packet, the direction of the transaction, and in the case of a handshake packet, it indicates success or failure of the transaction.
EOP field indicates the end of packet.
Other fields depend on the type of packet.
Token packet
Every setup transaction starts with a token packet. Here is the structure of the packet. The host always sends the token packet.
The PID value indicates the type of the token packet. Here are the possible values:
SETUP: Indicates the start of a setup transaction in a control transfer.
IN: Indicates that the host is requesting data from the device (read case).
OUT: Indicates that the host is sending data to the device (write case).
SOF: Indicates the start of frame. This type of token packet contains an 11-bit frame number. The host sends the SOF packet. The frequency at which this packet is sent depends on the bus speed. For full speed, the host sends the packet every 1millisecond; every 125 microsecond on a high-speed bus.
Data packet
Immediately following the token packet is the data packet that contains the payload. The number of bytes that each data packet can contain depends on the maximum packet size of the default endpoint. The data packet can be sent by either the host or the device, depending on the direction of the transfer.
Handshake packet
Immediately following the data packet is the handshake packet. The PID of the packet indicates whether or not the packet was received by the host or the device. The handshake packet can be sent by either the host or the device, depending on the direction of the transfer.
You can see the structure of transactions and packets by using any USB analyzer, such as Beagle, Ellisys, LeCroy USB protocol analyzers. An analyzer device shows how data is sent to or received from a USB device over the wire. In this example, let's examine some traces captured by a LeCroy USB analyzer. This example is for information only. This is not an endorsement by Microsoft.
Setup transaction
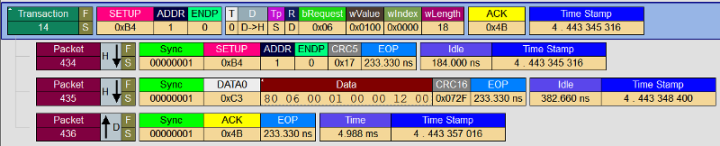
The host always initiates a control transfer. It does so by sending a setup transaction. This transaction contains a token packet called setup token followed by an 8-byte data packet. This screen shot shows an example setup transaction.
In the preceding trace, the host initiates (indicated by H↓) the control transfer by sending the setup token packet #434. Notice that the PID specifies SETUP indicating a setup token. The PID is followed by the device address and the address of the endpoint. For control transfers, that endpoint address is always 0.
Next, the host sends the data packet #435. The PID is DATA0 and that value is used for packet sequencing (to be discussed). The PID is followed by 8 bytes that contains the main information about this request. Those 8 bytes indicate the type of request and the size of the buffer in which the device will write its response.
All bytes are received in reverse order. As described in section 9.3, we see these fields and values:
Field
Size
Value
Description
bmRequestType (See 9.3.1 bmRequestType)
1
0x80
The data transfer direction is from device to host (D7 is 1)
The request is a standard request (D6…D5 is 0)
The recipient of the request is the DEVICE (D4 is 0)
bRequest (See section See 9.3.2 and Table 9-4)
1
0x06
The request type is GET_DESCRIPTOR.
wValue (See Table 9-5)
2
0x0100
The request value indicates that the descriptor type is DEVICE.
wIndex (See section 9.3.4)
2
0x0000
The direction is from the host to device (D7 is 1)
The endpoint number is 0.
wLength (See section 9.3.5)
2
0x0012
The request is to retrieve 18 bytes.
Thus, we can conclude that in this control (read) transfer, the host sends a request to retrieve the device descriptor and specifies 18 bytes as the transfer length to hold that descriptor. The way the device sends those 18 bytes depends on how much data the default endpoint can send in one transaction. That information is included in the device descriptor returned by the device in the data transaction.
In response, the device sends a handshake packet (#436 indicated by D↓). Notice that the PID value is ACK (ACK packet). This indicates that the device acknowledged the transaction.
Data transaction
Now, let's see what the device returns in response to the request. The actual data is transferred in a data transaction.
Here is the trace for the data transaction.
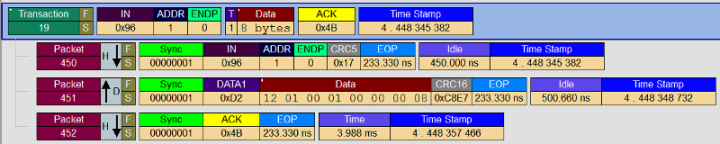
Upon receiving the ACK packet, the host initiates the data transaction. To initiate the transaction, it sends a token packet (#450) with direction as IN (called IN token).
In response, the device sends a data packet (#451) that follows the IN token. This data packet contains the actual device descriptor. The first byte indicates the length of the device descriptor, 18 bytes (0x12). The last byte in this data packet indicates the maximum packet size supported by the default endpoint. In this case, we see that the device can send 8 bytes at a time through its default endpoint.
Note
The maximum packet size of the default endpoint depends on the speed of the device. The default endpoint of a high-speed device is 64 bytes; low-speed device is 8 bytes.
The host acknowledges the data transaction by sending an ACK packet (#452) to the device.
Let's calculate the amount of data returned. In the wLength field of the data packet (#435) in the setup transaction, the host requested 18 bytes. In the data transaction, we see that only first 8 bytes of the device descriptor were received from the device. So, how does the host receive information stored in the remaining 10 bytes? The device does so in two transactions: 8 bytes and then last 2 bytes.
Now that the host knows the maximum packet size of the default endpoint, the host initiates a new data transaction and requests the next portion based on the packet size.
Here is the next data transaction:
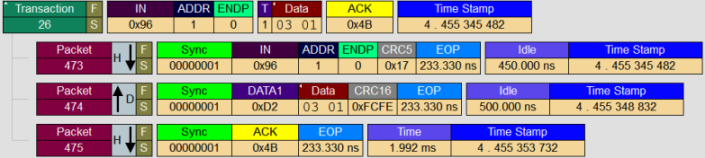
The host initiates the preceding data transaction by sending an IN token (#463) and requesting the next 8 bytes from the device. The device responds with a data packet (#464) that contains the next 8 bytes of the device descriptor.
Upon receiving the 8 bytes, the host sends an ACK packet (#465) to the device.
Next, the host requests the last 2 bytes in another data transaction as follows:
Therefore, we see that to transfer 18 bytes from the device to the host, the host keeps track of the number of bytes transferred and initiated three data transactions (8+8+2).
Note
Notice the PID of the data packets in data transactions 19, 23, 26. The PID alternates between DATA0 and DATA1. This sequence is called data toggling. In cases where there are multiple data transactions, data toggling is used to verify the packet sequence. This method makes sure that the data packets are not duplicated or lost.
By mapping the consolidated data packets to the structure of the device descriptor (See Table 9-8), we see these fields and values:
Field
Size
Value
Description
bLength
1
0x12
Length of the device descriptor, which is 18 bytes.
bDescriptorType
1
0x01
The descriptor type is device.
bcdUSB
2
0x0100
The specification version number is 1.00.
bDeviceClass
1
0x00
Device class is 0. Each interface in the configuration has the class information.
bDeviceSubClass
1
0x00
Subclass is 0 because device class is 0.
bProtocol
1
0x00
Protocol is 0. This device does not use any class-specific protocols.
bMaxPacketSize0
1
0x08
The maximum packet size of the endpoint is 8 bytes.
idVendor
2
0x0562
Telex Communications.
idProduct
2
0x0002
USB microphone.
bcdDevice
2
0x0100
Indicates the device release number.
iManufacturer
1
0x01
Manufacturer string.
iProduct
1
0x02
Product string.
iSerialNumber
1
0x03
Serial number.
bNumConfigurations
1
0x01
Number of configurations.
By examining those values we have some preliminary information about the device. The device is a low-speed USB microphone. The maximum packet size of the default endpoint is 8 bytes. The device supports one configuration.
Status transaction
Finally, the host completes the control transfer by initiating the last transaction: status transaction.
The host starts the transaction with an OUT token packet (#481). The purpose of this packet is to verify that the device sent all of the requested data. There is no data packet sent in this status transaction. The device responds with an ACK packet. If an error occurred, the PID could have been either NAK or STALL.
Before the client driver can enumerate pipes, make sure that these requirements are met:
The client driver must have created the framework USB target device object.
If you are using the USB templates that are provided with Microsoft Visual Studio Professional 2012, the template code performs those tasks. The template code obtains the handle to the target device object and stores in the device context.
The most important aspect for a control transfer is to format the setup token appropriately. Before sending the request, gather this set of information:
Direction of the request: host to device or device to host.
Recipient of the request: device, interface, endpoint, or other.
Category of request: standard, class, or vendor.
Type of request, such as a GET_DESCRIPTPOR request. For more information, see section 9.5 in the USB specification.
wValue and wIndex values. Those values depend on the type of request.
You can obtain all that information from the official USB specification.
If you are writing a UMDF driver, get the header file, Usb_hw.h from the UMDF Sample Driver for OSR USB Fx2 Learning Kit. This header file contains useful macros and structure for formatting the setup packet for the control transfer.
All UMDF drivers must communicate with a kernel-mode driver in order to send and receive data from devices. For a USB UMDF driver, the kernel-mode driver is always the Microsoft-provided driver WinUSB (Winusb.sys).
Whenever a UMDF driver makes a request for the USB driver stack, the Windows I/O manager sends the request to WinUSB. After receiving the request, WinUSB either processes the request or forwards it to the USB driver stack.
Microsoft-defined methods for sending control transfer requests
A USB client driver on the host initiates most control requests to get information about the device, configure the device, or send vendor control commands. All of those requests can be categorized into:
Standard requests are defined in the USB specification. The purpose of sending standard requests is to obtain information about the device, its configurations, interfaces, and endpoints. The recipient of each request depends on the type of request. The recipient can be the device, an interface, or an endpoint.
Note
The target of any control transfer is always the default endpoint. The recipient is the device's entity whose information (descriptor, status, and so on) the host is interested in.
Requests can be further classified into: configuration requests, feature requests, and status requests.
Configuration requests are sent to get information from the device so that the host can configure it, such as a GET_DESCRIPTOR request. These requests can also be write requests that are sent by the host to set a particular configuration or alternate setting in the device.
Feature requests are sent by the client driver to enable or disable certain Boolean device settings supported by the device, interface, or an endpoint.
Status requests enable the host get or set the USB-defined status bits of a device, endpoint, or interface.
For more information, see Section 9.4 in USB specification, version 2.0. The standard request types are defined the header file, Usbspec.h.
Class requests are defined by a specific device class specification.
Vendor requests are provided by the vendor and depend on the requests supported by the device.
The Microsoft-provided USB stack handles all the protocol communication with the device as shown in the preceding traces. The driver exposes device driver interfaces (DDIs) that enable a client driver to send control transfers in many ways. If your client driver is a Windows Driver Foundation (WDF) driver, it can call routines directly to send the common types of control requests. WDF supports control transfers intrinsically for both KMDF and UMDF.
Certain types of control requests are not exposed through WDF. For those requests, the client driver can use the WDF-hybrid model. This model allows the client driver to build and format WDM URB-style requests and then send those requests by using WDF framework objects. The hybrid model only applies to kernel-mode drivers.
For UMDF drivers:
Use the helper macros and structure defined in usb_hw.h. This header is included with the UMDF Sample Driver for OSR USB Fx2 Learning Kit.
Use this table to determine the best way to send control requests to the USB driver stack.
If you want to send a control request to...
For a KMDF driver...
For a UMDF driver...
For a WDM driver, build a URB structure (Helper routine)
CLEAR_FEATURE: Disable certain feature settings in device, its configurations, interfaces and endpoints. See section 9.4.1 in the USB specification.
By default KMDF selects the default configuration and first alternate setting in each interface. The client driver can change the default configuration by calling WdfUsbTargetDeviceSelectConfigType method and specifying WdfUsbTargetDeviceSelectConfigTypeUrb as the request option. You must then format an URB for this request and submit it to the USB driver stack.
By default UMDF selects the default configuration and first alternate setting in each interface. The client driver cannot change the configuration.
Declare a setup packet. See the WINUSB_CONTROL_SETUP_PACKET structure declared in usb_hw.h.
Initialize the setup packet by calling the helper macro, WINUSB_CONTROL_SETUP_PACKET_INIT_CLASS or WINUSB_CONTROL_SETUP_PACKET_INIT_VENDOR, defined in usb_hw.h.
Specify the direction (see the WINUSB_BMREQUEST_DIRECTION enumeration), the recipient ( see the WINUSB_BMREQUEST_RECIPIENT enumeration), and the request, as described in the class or the hardware specification.
How to send a control transfer for vendor commands - KMDF
This procedure shows how a client driver can send a control transfer. In this example, the client driver sends a vendor command that retrieves the firmware version from the device.
Declare a constant for the vendor command. Study the hardware specification and determine the vendor command that you want to use.
Declare a WDF_MEMORY_DESCRIPTOR structure and initialize it by calling the WDF_MEMORY_DESCRIPTOR_INIT_BUFFER macro. This structure will receive the response from the device after the USB driver completes the request.
Depending on whether you send the request synchronously or asynchronously, specify your send options:
If you send the request synchronously by calling WdfUsbTargetDeviceSendControlTransferSynchronously, specify a timeout value. That value is important because without a timeout, you can block the thread indefinitely.
If you are sending the request asynchronously, implement a completion routine. Free all allocated resources in the completion routine.
Declare a WDF_USB_CONTROL_SETUP_PACKET structure to contain the setup token and format the structure. To do so, call the WDF_USB_CONTROL_SETUP_PACKET_INIT_VENDOR macro to format the setup packet. In the call specify, the direction of the request, the recipient, the sent-request options (initialized in step3), and the constant for the vendor command.
Check the NTSTATUS value returned by the framework and inspect the received value.
This code example sends a control transfer request to a USB device to retrieve its firmware version. The request is sent synchronously and the client driver specifies a relative timeout value of 5 seconds (in 100-nanosecond units). The driver stores the received response in the driver-defined device context.
enum {
USBFX2_GET_FIRMWARE_VERSION = 0x1,
....
} USBFX2_VENDOR_COMMANDS;
#define WDF_TIMEOUT_TO_SEC ((LONGLONG) 1 * 10 * 1000 * 1000) // defined in wdfcore.h
const __declspec(selectany) LONGLONG
DEFAULT_CONTROL_TRANSFER_TIMEOUT = 5 * -1 * WDF_TIMEOUT_TO_SEC;
typedef struct _DEVICE_CONTEXT
{
...
union {
USHORT VersionAsUshort;
struct {
BYTE Minor;
BYTE Major;
} Version;
} Firmware; // Firmware version.
} DEVICE_CONTEXT, *PDEVICE_CONTEXT;
__drv_requiresIRQL(PASSIVE_LEVEL)
VOID GetFirmwareVersion(
__in PDEVICE_CONTEXT DeviceContext
)
{
NTSTATUS status;
WDF_USB_CONTROL_SETUP_PACKET controlSetupPacket;
WDF_REQUEST_SEND_OPTIONS sendOptions;
USHORT firmwareVersion;
WDF_MEMORY_DESCRIPTOR memoryDescriptor;
PAGED_CODE();
firmwareVersion = 0;
WDF_MEMORY_DESCRIPTOR_INIT_BUFFER(&memoryDescriptor, (PVOID) &firmwareVersion, sizeof(firmwareVersion));
WDF_REQUEST_SEND_OPTIONS_INIT(
&sendOptions,
WDF_REQUEST_SEND_OPTION_TIMEOUT
);
WDF_REQUEST_SEND_OPTIONS_SET_TIMEOUT(
&sendOptions,
DEFAULT_CONTROL_TRANSFER_TIMEOUT
);
WDF_USB_CONTROL_SETUP_PACKET_INIT_VENDOR(&controlSetupPacket,
BmRequestDeviceToHost, // Direction of the request
BmRequestToDevice, // Recipient
USBFX2_GET_FIRMWARE_VERSION, // Vendor command
0, // Value
0); // Index
status = WdfUsbTargetDeviceSendControlTransferSynchronously(
DeviceContext->UsbDevice,
WDF_NO_HANDLE, // Optional WDFREQUEST
&sendOptions,
&controlSetupPacket,
&memoryDescriptor, // MemoryDescriptor
NULL); // BytesTransferred
if (!NT_SUCCESS(status))
{
KdPrint(("Device %d: Failed to get device firmware version 0x%x\n", DeviceContext->DeviceNumber, status));
TraceEvents(DeviceContext->DebugLog,
TRACE_LEVEL_ERROR,
DBG_RUN,
"Device %d: Failed to get device firmware version 0x%x\n",
DeviceContext->DeviceNumber,
status);
}
else
{
DeviceContext->Firmware.VersionAsUshort = firmwareVersion;
TraceEvents(DeviceContext->DebugLog,
TRACE_LEVEL_INFORMATION,
DBG_RUN,
"Device %d: Get device firmware version : 0x%x\n",
DeviceContext->DeviceNumber,
firmwareVersion);
}
return;
}
How to send a control transfer for GET_STATUS - UMDF
This procedure shows how a client driver can send a control transfer for a GET_STATUS command. The recipient of the request is the device and the request obtains information in bits D1-D0. For more information, see Figure 9-4 in the USB specification.
Include the header file Usb_hw.h available with the UMDF Sample Driver for OSR USB Fx2 Learning Kit.
Declare a WINUSB_CONTROL_SETUP_PACKET structure.
Initialize the setup packet by calling the helper macro, WINUSB_CONTROL_SETUP_PACKET_INIT_GET_STATUS.
Specify BmRequestToDevice as the recipient.
Specify 0 in the Index value.
Call the helper method SendControlTransferSynchronously to send the request synchronously.
The helper method builds the request by associating the initialized setup packet with the framework request object and the transfer buffer by calling IWDFUsbTargetDevice::FormatRequestForControlTransfer method. The helper method then sends the request by calling the IWDFIoRequest::Send method. After the method returns, inspect the value returned.
To determine if the status indicates self-powered, remote wake-up, use these values defined in the WINUSB_DEVICE_TRAITS enumeration:
This code example sends a control transfer request to a get the status of the device. The example sends the request synchronously by calling a helper method named SendControlTransferSynchronously.
The following code example shows the implementation of the helper method named SendControlTransferSynchronously. This method sends a request synchronously.
If you are using Winusb.sys as the function driver for your device, you can send control transfers from an application. To format the setup packet in WinUSB, use the UMDF helper macros and structures, described in the table in this article. To send the request, call WinUsb_ControlTransfer function.
The articles in this section provide information about USB pipes and URBs for I/O requests, and describe how a client driver can use device driver interfaces (DDIs) to transfer data to and from a USB device.
This topic describes the WDF-provided continuous reader object. The procedures in this topic provide step-by-step instructions about how to configure the object and use it to read data from a USB pipe.
This article provides an overview of USB pipes and describes the steps required by a USB client driver to obtain pipe handles from the USB driver stack.